


In this FAQ we will cover some common faults that are triggered and how to resolve them by tuning the settings available on the MCx devices (with example pictures from the GUI).
1. MPET IPD Faults
A common fault we see with customers are MPET faults, specifically with IPD. MPET IPD Faults can get triggered under the following conditions:
- Motor is not connected to the IC.
- MPET IPD current threshold is set too low.
- Motor inductance is too low (less than few µH).
You can solve this issue by increasing the MPET IPD current threshold or manually measuring the resistance and inductance at 1 kHz using LCR meter. To do this, measure phase-phase and divide by 2 to get phase-neutral values that we want to store in the EEPROM. You can use this E2E FAQ to learn more: https://e2e.ti.com/support/motor-drivers-group/motor-drivers/f/motor-drivers-forum/1213224/faq-what-are-motor-parameters-why-are-they-needed-and-how-do-i-measure-them?tisearch=e2e-sitesearch&keymatch=faq%3Atrue
2. MPET BEMF-Constant measurement fault
Another common fault we get is the MPET BEMF-Constant fault. The MPET Ke fault can get triggered on high resistance motors when the MPET open loop current reference is set too low.
You can solve this by increasing the MPET open loop current reference. If this does not fix it, engineers can always manually measure the motor parameters and enter them into the registers using this E2E FAQ: https://e2e.ti.com/support/motor-drivers-group/motor-drivers/f/motor-drivers-forum/1213224/faq-what-are-motor-parameters-why-are-they-needed-and-how-do-i-measure-them?tisearch=e2e-sitesearch&keymatch=faq%3Atrue
3. Abnormal BEMF fault
Abnormal BEMF fault can get triggered on lower BEMF constant motors when the Auto handoff is enabled and minimum BEMF for auto handoff is set to 0 mV.
You can solve this by disabling Auto handoff and setting the BEMF handoff threshold to 50 mV or higher.
4. Motor startup failure in align startup method
The motor can fail to start when the rotor does not get sufficient time to align due to shorter align time or lower align current.
You can solve this by increasing the align time and adjusting the align current until there are no oscillations seen on the rotor after aligning.
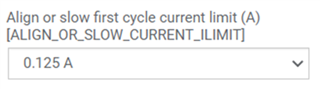
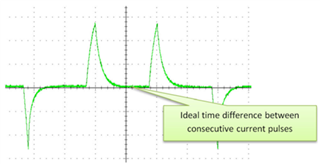
5. Motor startup failure in IPD startup method
Motor can fail to start when the IPD clock frequency is set too high. Motors with high inductance and high current thresholds require longer time for the current to settle down.
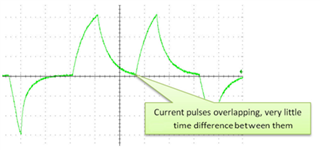

You can solve this by decreasing the IPD clock frequency. See the figure below:
6. Speed overshoots during handoff
Motor speed can overshoot and cause acoustic noise when there is sudden change in phase current during open to closed loop transition.
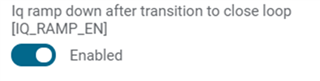
To address this issue, it is recommended to enable the Iq ramp down and configure the ramp rate for reducing the difference between estimated and open loop angle.
7. Loss of Sync in Trapezoidal Commutation
The loss of sync fault gets triggered when the motor loses synchronization due to improper selection of motor startup and open loop acceleration profiles.
When motor loses synchronization, we might notice the motor either vibrate or stall.
When the motor vibrates, follow the below recommendations:
- Increase align time [ALIGN_TIME].
- Increase open loop acceleration A1 [OL_ACC_A1] and open loop acceleration A2 [OL_ACC_A2].
When the motor stalls, follow the below recommendation:
- Decrease open loop acceleration A1 [OL_ACC_A1] and open loop acceleration A2 [OL_ACC_A2].
