Other Parts Discussed in Thread: DRV8711,
Hi support team.
Our customer asked us regarding unstable period of current regulation in full step.
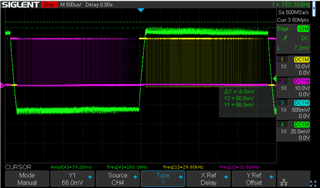
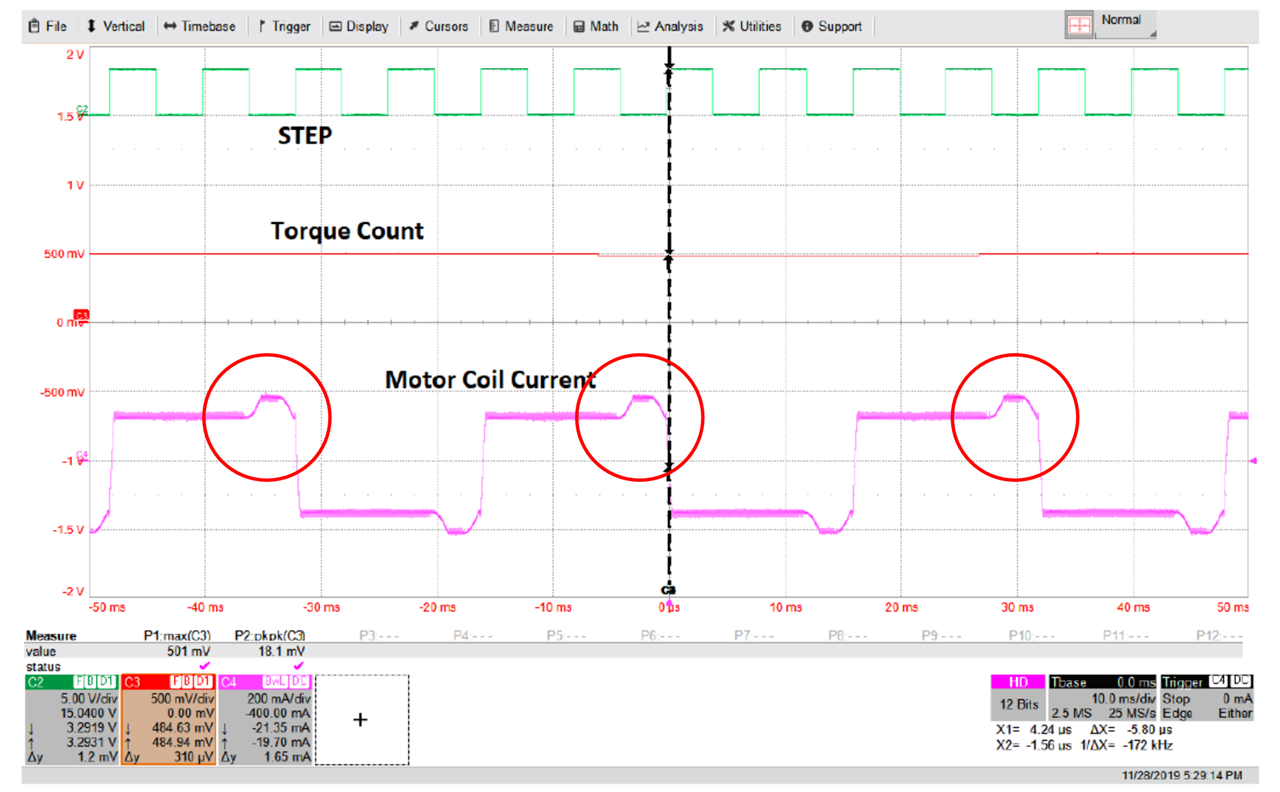
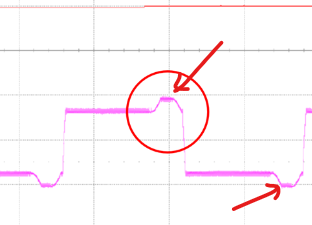
As shown in the waveform below during full step, an event in which the current waveform is distorted (worsened current regulation?) is observed just before the phase switching.
This is noticeable in STRC mode.
Why is this?
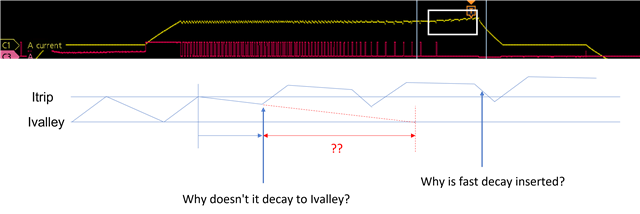
In theory, we thought that the regulation would not deteriorate because there should be no limit of OFF in one cycle in STRC.
Best regards,
Higa



 .
.