Other Parts Discussed in Thread: DRV8873,
Here is my situation. I can't seem to use this device under load without it entering a fault condition. I connected an electronic load at 0.5 amps, and when pulling nSleep high, the nFault pin is pulled low and the device output is disabled. Curiously, if I pull nSleep high before turning the load on, it works perfectly when I turn the load on. In summary,
- No load (just some small LEDs) - works perfectly
- Load turn on after setting nSleep high - works perfectly
- Load present before turning nSleep high - enters fault mode
I tried a load from 0.2 amps up to 1.0 amps, and the result is independent of the load - both being in fault mode or not fault mode. The only exception is no fault occurs for extremely small loads of a few milliamps. My motor voltage is 24 volts.
What am I missing here? How can I resolve this problem?
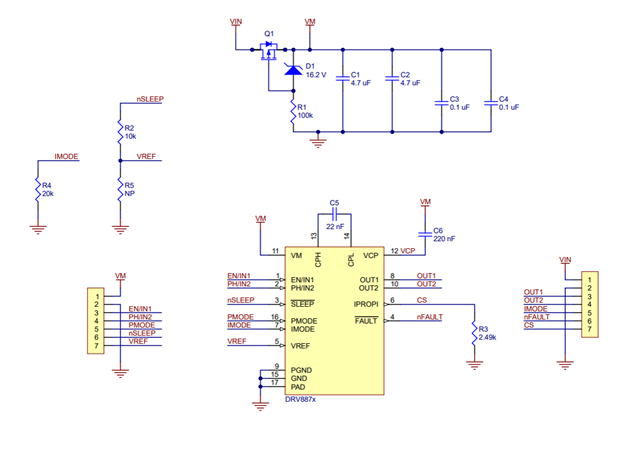
In case you need a reference circuit, I am reproducing this problem with this simple breakout board from Pololu - https://www.pololu.com/product/4035
Here is their schematic: