Hi team,
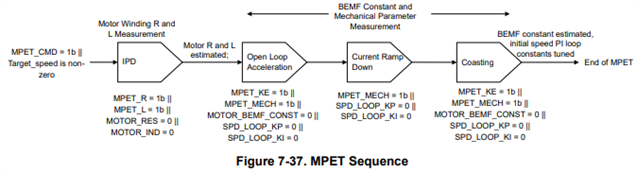
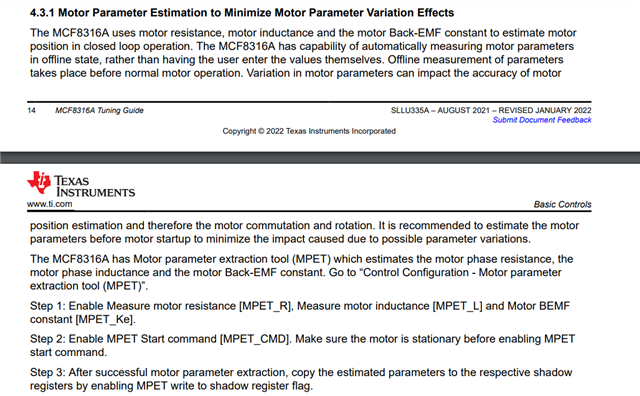
1) How to use MPET? The customer followed the steps in below figure for MPET auto-fetch. Could you help tell where can we see a reminder about the successful extraction? And how to write into the relevant registers?
2) With speed controlled via I2C, the motor can work, but it stops automatically without reporting error. The current sometimes decreases after stopping.
Could you help check this case? Thanks.
Best Regards,
Cherry