Hi,
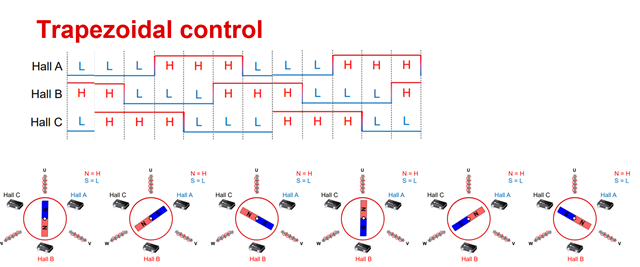
This is a question about BLDC trapezoidal commutation.
We all know that each Hall sensor changes its output every 180° in trapezoidal commutation, so for the Hall sensor and the rotor, the output of the Hall sensor will change at which point the rotor's magnetic pole moves?
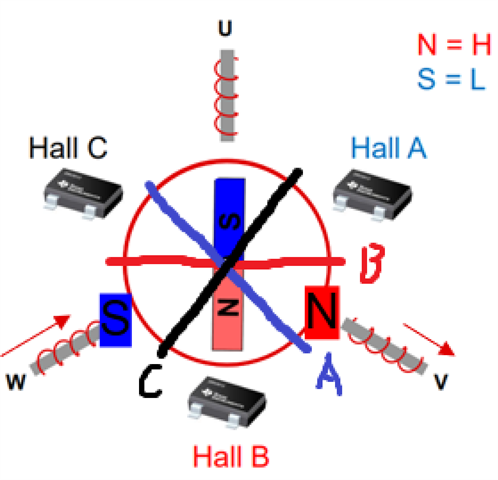
For example, in the lower left corner of the following figure, why does the Hall sensor start to output L when the N pole of the rotor is aligned with the U phase of the motor? Is it because the sensing range of the Hall sensor is 120°, when N and U are aligned, it enters the sensing range of the Hall sensor? Or is it that the rotor magnetic field strength at this moment has reached the threshold for the sensor output to change? If the latter, wouldn't permanent magnets of different field strengths cause the rotor to change sensor output at different positions?
This question confuses me, hope you can help me out.
Thank you so much.