Other Parts Discussed in Thread: MCF8315A
Hello,
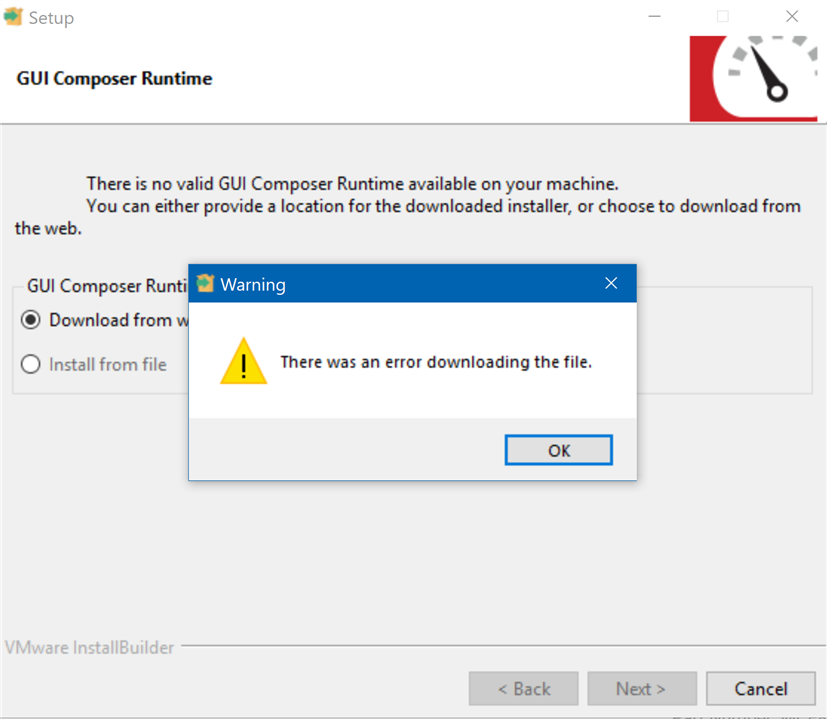
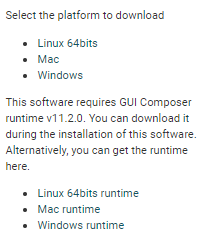
I am unable to connect to this board using the GUI. I have tried both chrome and firefox with neither functioning. I do see the port available in the selection and left the baud at 9600. I have also attempted to install the windows version of the software, but am running into issues with the installation of GUI Composer. It will not install from the web, and pointing it to an installed GUI Composer runtime I had installed (6.2.0.1) it would not find a valid runtime.
I also am unable to spin a motor by following the steps in the tuning guide/GUI to use the pot speed selection.
I am looking for some assistance with making this functional. Thanks!