Other Parts Discussed in Thread: DRV8424E, DRV8424, DRV8424EVM, DRV8426, DRV8428
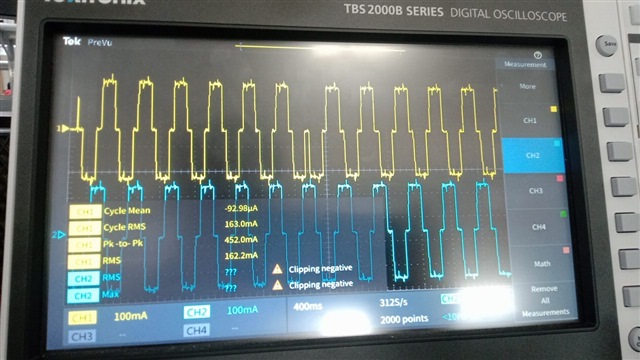
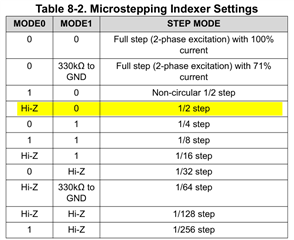
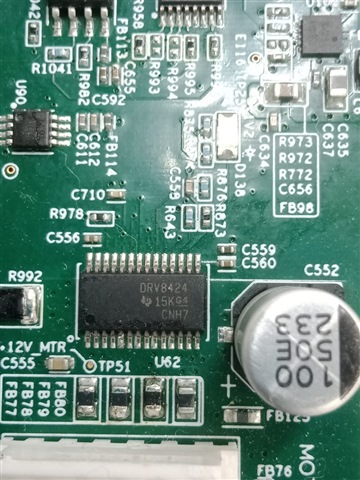
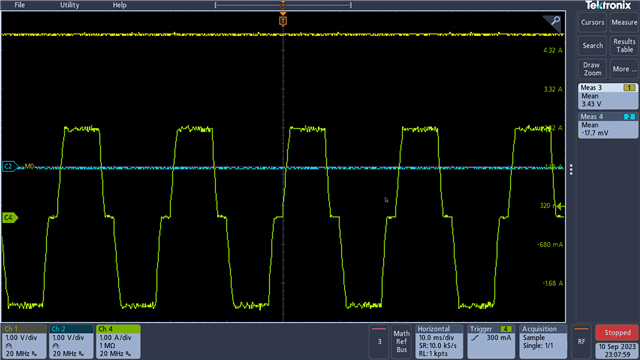
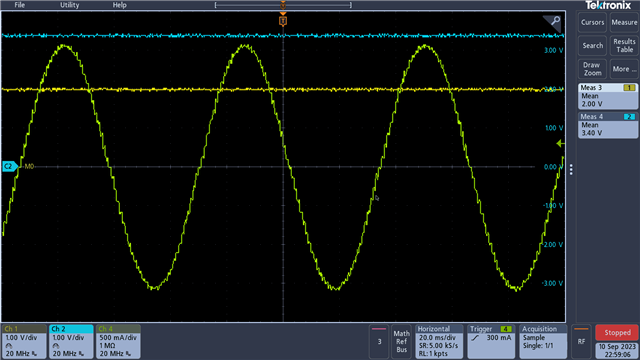
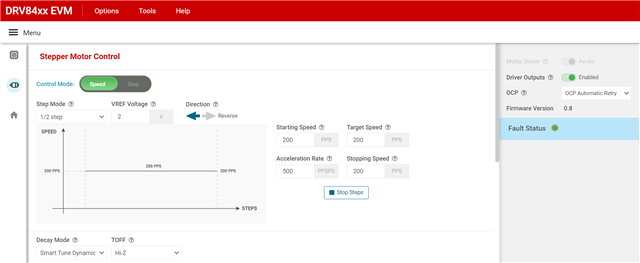
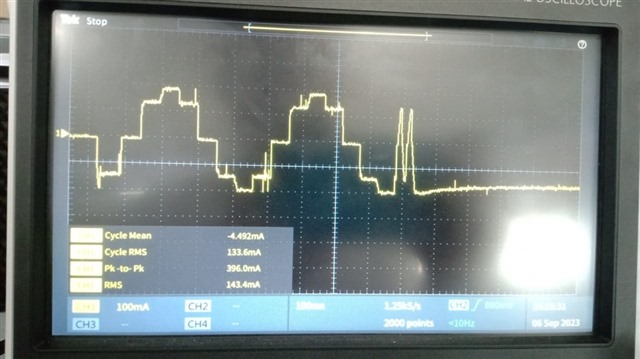
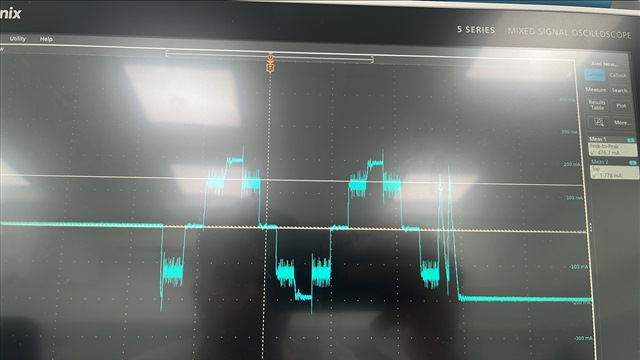
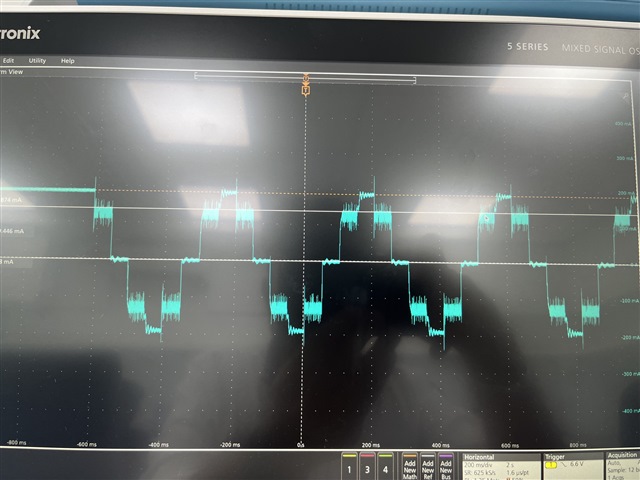
We are using DRV8424PWPR in our design. We have configured the motor driver in circular half step configuration. But if we measure the output current the waveform seems to be non circular. Could you please suggest how to configure the motor driver in circular half step configuration. Also attached the current waveform for your reference.