Part Number: DRV8876-Q1
Dear, Support team.
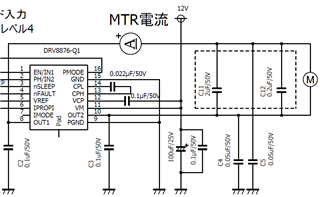
Our customers are evaluating the DRV8876-Q1.
Target function: Relationship between “current chopping mode” and “overcurrent protection (OCP)”
In current chopping mode, the H-bridge transitions to braking when the ITRIP threshold is exceeded;
We recognize this as a function to reduce motor current consumption.
Overcurrent protection (OCP) disables all MOSFETs in the H-bridge when the overcurrent threshold IOCP is exceeded.
There is a possibility that it will be done.
In the customer's circuit design, the relationship is ITRIP threshold < overcurrent threshold IOCP.
Current chopping mode operates before overcurrent protection.
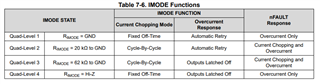
I want the microcontroller to detect the low output from the nFAULT pin when overcurrent is detected using IMODE Functions' "Quad Level 4".
The customer's usage is that the current chopping threshold is lower than the overcurrent threshold, so current chopping reduces current consumption.
Will the overcurrent threshold be reached?
(Will the microcontroller not be able to detect the low output from nFAULT when overcurrent is detected?)
Is it possible that the overcurrent protection does not work due to current chopping mode?
Overcurrent Threshold Any attempt to generate a current that exceeds the IOCP is suppressed by the current chopping mode.
Is there a possibility that overcurrent cannot be detected?
To give you specific numbers, the motor current consumption is
・If it exceeds 3.1A: Current chopping operates.
・If exceeds 3.5A: Short circuit detection operates
I want to have a relationship like that.
Thanks & Best regards,
Hiroaki Yuyama