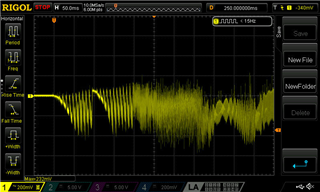
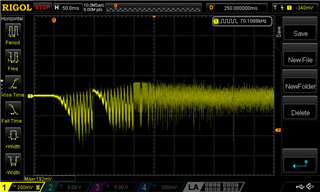
Although the MCT8329A's EEPROM has been reliably written to the EEPROM, the motor output (operation) is expected for the command several times out of every three startups, but the motor output is lower than the expected output for the command about once out of every three times. The input is a PWM input and each setting value has already been set in the EEPROM. I am having trouble understanding the cause of this problem.
Is there any reference such as this sequence to be performed at startup that must be processed in this order? Or have you encountered cases like this in the past?
{
"signature": "oneui-register-data",
"data": [
[
{
"idx": 0,
"id": "isd_config",
"value": "0x6F404442"
},
{
"idx": 1,
"id": "motor_startup1",
"value": "0x3ABA8A97"
},
{
"idx": 2,
"id": "motor_startup2",
"value": "0x7761CC82"
},
{
"idx": 3,
"id": "closed_loop1",
"value": "0x2BAE1600"
},
{
"idx": 4,
"id": "closed_loop2",
"value": "0x03AA00BA"
},
{
"idx": 5,
"id": "closed_loop3",
"value": "0x34C92001"
},
{
"idx": 6,
"id": "closed_loop4",
"value": "0x601ADF44"
},
{
"idx": 7,
"id": "const_speed",
"value": "0x3FF2FF01"
},
{
"idx": 8,
"id": "const_pwr",
"value": "0x1BB84400"
},
{
"idx": 9,
"id": "150_deg_two_ph_profile",
"value": "0x24DB7200"
},
{
"idx": 10,
"id": "150_deg_three_ph_profile",
"value": "0x48DB6946"
},
{
"idx": 11,
"id": "ref_profiles1",
"value": "0x6DAD6E12"
},
{
"idx": 12,
"id": "ref_profiles2",
"value": "0x497999B9"
},
{
"idx": 13,
"id": "ref_profiles3",
"value": "0x76263608"
},
{
"idx": 14,
"id": "ref_profiles4",
"value": "0x007F8000"
},
{
"idx": 15,
"id": "ref_profiles5",
"value": "0x40000000"
},
{
"idx": 16,
"id": "ref_profiles6",
"value": "0x007F8000"
}
],
[
{
"idx": 0,
"id": "algo_ctrl1",
"value": "0x40000000"
},
{
"idx": 1,
"id": "device_ctrl",
"value": "0x00000000"
}
],
[
{
"idx": 0,
"id": "ana_trim3",
"value": "0x48004800"
},
{
"idx": 1,
"id": "ana_trim4",
"value": "0x4A00000000"
},
{
"idx": 2,
"id": "ana_trim5",
"value": "0x0000004A"
},
{
"idx": 3,
"id": "ana_trim6",
"value": "0x00000000"
},
{
"idx": 4,
"id": "ana_trim7",
"value": "0x00E5D8E2"
},
{
"idx": 5,
"id": "ana_trim8",
"value": "0x00005ED1"
},
{
"idx": 6,
"id": "ana_trim9",
"value": "0x00A1C71D"
},
{
"idx": 7,
"id": "ana_trim10",
"value": "0x53790F3E"
}
],
[
{
"idx": 0,
"id": "fault_config1",
"value": "0x717BB738"
},
{
"idx": 1,
"id": "fault_config2",
"value": "0x7585C00A"
}
],
[
{
"idx": 0,
"id": "gate_driver_fault_status",
"value": "0x00000000"
},
{
"idx": 1,
"id": "controller_fault_status",
"value": "0x00000000"
}
],
[
{
"idx": 0,
"id": "gd_config1",
"value": "0x000680FF"
},
{
"idx": 1,
"id": "gd_config2",
"value": "0x00000000"
}
],
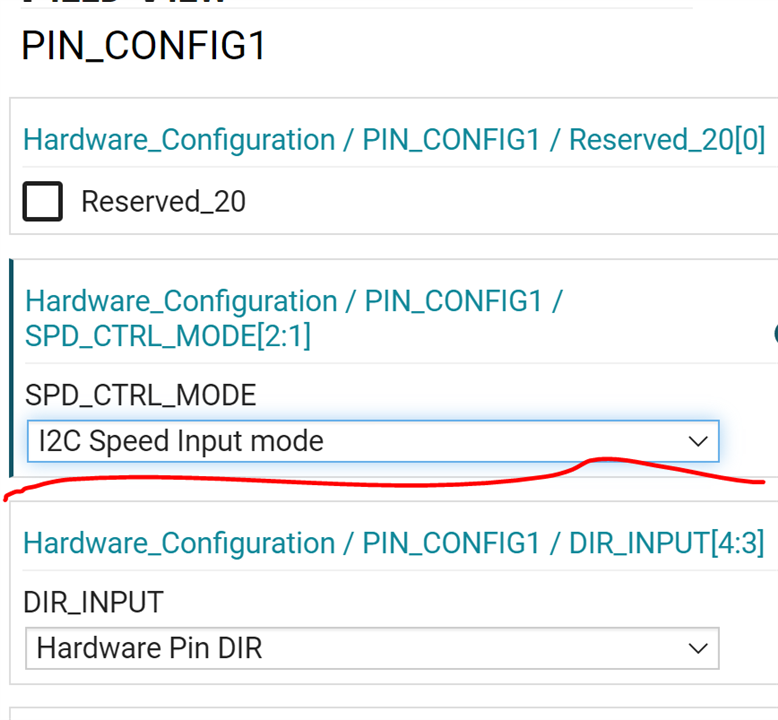
[
{
"idx": 0,
"id": "pin_config1",
"value": "0x20600002"
},
{
"idx": 1,
"id": "pin_config2",
"value": "0x3E1020AA"
},
{
"idx": 2,
"id": "device_config",
"value": "0x27104008"
}
],
[
{
"idx": 0,
"id": "sys_status1",
"value": "0x00A69964"
},
{
"idx": 1,
"id": "sys_status2",
"value": "0xE0010000"
},
{
"idx": 2,
"id": "sys_status3",
"value": "0x00000000"
}
]
]
}