Hi Team,
When driving motor motion with MCF8316A, the motor stops after a period of time.
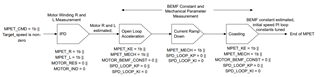
The customer initially suspected that the motor might have entered MPET mode, so tried to disable MPET mode and set [MOTOR_RES], [MOTOR_IND], [MOTOR_BEMF_CONST], [SPD_LOOP_KP] and [SPD_LOOP_Ki] registers all to a non-zero value. The motor can be operated at the above settings, but the current will remain at 3.1-2.7A. Then they tries to control the current using parameters such as Curr_loop_KP and Curr_loop_Ki registers and SPD_loop_KP and SPD_loop_Ki, while the current will also remain at 3A.
Is the current too high due to incorrect setting of the motor resistance and inductance these basic parameters? Or is it controlled by other registers? Could you help check this case? Thanks.
Best Regards,
Cherry