Hello team,
I would like to estimate the error of the motor angle when using microstepping.
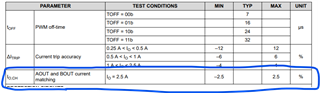
The datasheet says the error of AOUT and BOUT current matching is +-2.5%.
It means if we would set the angle to 45 deg e.g., each current could be I_full * sin(45) * 102.5% and I_full * cos(45) in worst case, while they both should be I_full * sin(45) and I_full * cos(45)?
And then, the actual angle could be arctan((I_full * sin(45) * 102.5%) / (I_full * cos(45)) = 45.7deg, instead of 45deg? Is my understanding correct?