Hello expert,
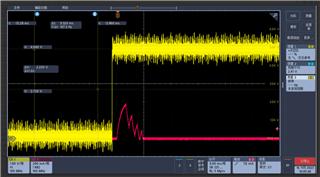
In my design DRVOFF is pull down to GND via 10k resistor. When the nsleep is pulled up by MCU, we find output inrush current on the A/Boutx. Why and how to improve?
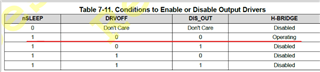
I find in the datasheet that H bridge can output only when nsleep=1, DRVOFF=0 and DIS_OUT=0, so it seems that the default value of DIS_OUT is 1 when power on. It seems unreasonable