I use DRV8462 to design our precision motion control system. it is working well. the only issue is Customizable micro-stepping.
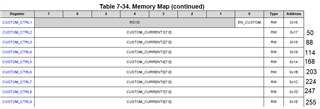
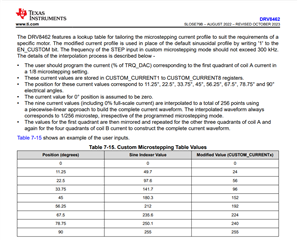
I load the customized number into register 0x17-0x1E.
when I set EN_CUSTOM to 0
if write 0xFA into register 0x05 , will cause motor move forward 1/256 step. (register 0x11 number increase/decrease 1 step)
the write 0xF5 into register 0x05 , will cause motor move forward 1/8 step. (register 0x11 number increase/decrease 32 steps)
MICROSTEP_MODE [3:0] works
but, if I set EN_CUSTOM to 1
No matter what MICROSTEP_MODE I selected.
write 0xFA or 0xF6 or 0xF0 into register 0x05 , the motor always move forward 1/8 step. (register 0x11 number will turn to same as the CUSTOM_CURRENTx value)
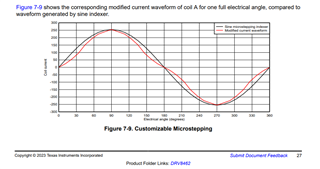
is it possible to make DRV8462 able to support 1/256 micro-step mode using a Customizable micro-stepping table?