


Other Parts Discussed in Thread: MCF8329A
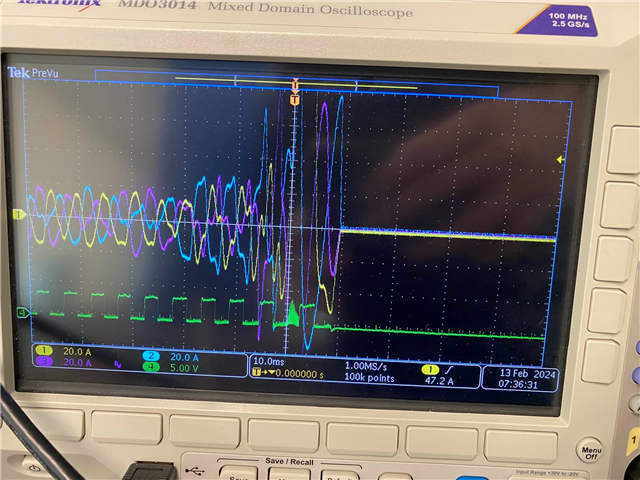
Hi, I'm seeing some control loop instability when running my motor with higher loads. I have the motor driving and adjustable load that I can control. At no load and smaller loads it runs fine, but when the load is increased I end up with the situation shown in the scope capture below. The motor seems to handle the increased load for up to a few seconds but then the currents oscillate out of control until limits are exceeded or the power supply is overwhelmed and can't keep up. I suspect the issue lies in the control loop settings but I could use some guidance on where to look.
The motor is rated for 80A peak and ILIMIT settings are around 90A. The only fault I see this time is APP_RESET presumably from the bus undervoltage
In this first trace channels 1-3 are phase currents and channel 4 is bus voltage

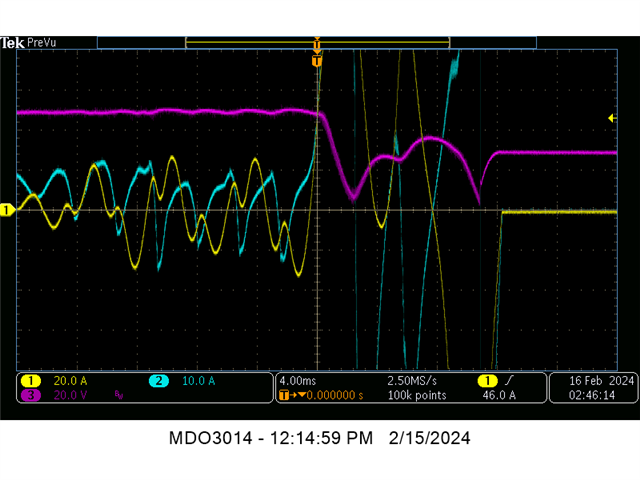
In this second image CH4 is monitoring motor speed through FGOUT. You can see here that RPM remains stable until the problem occurs, so I'm not sure what the control loop would be reacting to to increase current so drastically


 6
6