Hi the all of support team.
My customer has the problem when starting motor rotation.
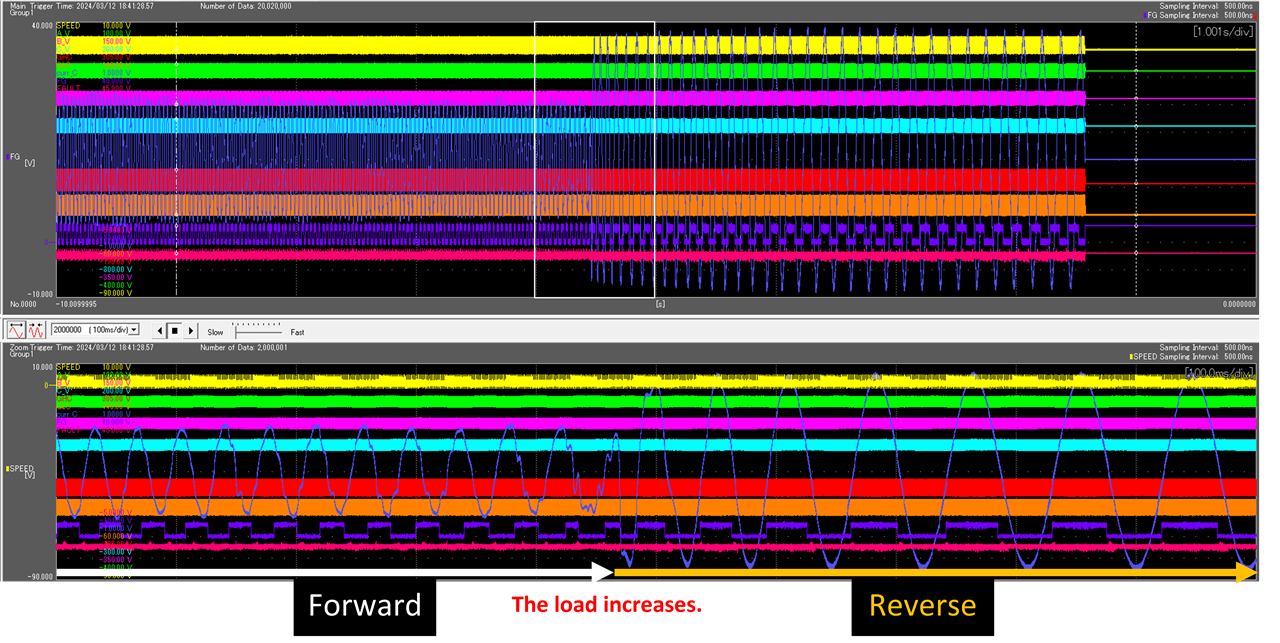
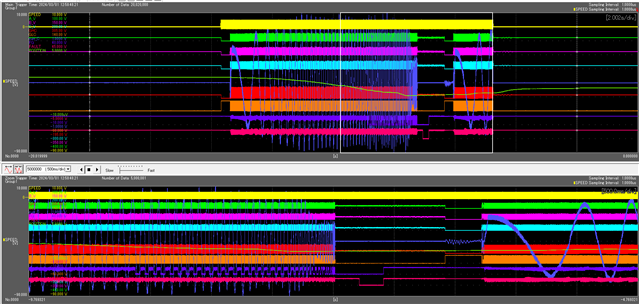
I share the waveform regarding drive node voltage & current & gate voltage & speed ref input and setting file(json file).
Yellow : Speed ref input
Green : Drive node voltage (Phase A)
Pink : Drive node voltage (Phase B)
Light blue : Drive node voltage (Phase C)
Red : Gate voltage (phase C on highside)
Orange : Gate voltage (phase C on lowside)
Purple : FG output
Light red(the bottom line) : nFault output
-Additional information
Maximum speed: 112Hz (24 pole pairs, 480rpm(max))
Speed reference input at startup: 1kHz (Duty 25%) constant
Motor maximum rated current: 7.5A
<question>
The ABN_SPEED error is detected and the motor rotation stops.
What are the possible causes?
I thought the handoff was not working properly, so I tried changing the handoff threshold, but it didn't work.
We appreciate it if you could give us some advise.
Best regards,
Higa