Questions:
- How to achieve a low noise performance of stepper?
- What impacts noise of a running stepper?
- Which drv8711 driver configurations impact noise?
- How to achieve a minimal vibration performance of a stepper?
- What causes vibration of a running stepper?
- Which drv8711 driver configurations impact vibration?
- Are the below current waveforms expected?
- Do higher frequencies cause triangular/square current waveforms?
- Can we set configurations such that the current waveforms are sinusoidal for all ranges of speed (1Hz to 250kHz)?
- For accelerating and decelerating the stepper, do we need a non-zero starting speed and stopping speed?
- Why?
- Why powering on motor (setting enable on CRTL Register of DRV8711) makes the motor jump/jerk?
My setup configuration is as follow:
- Stepper Motor: Bipolar Stepper Motor Frame Size 23 200.0 Step 2.8 A 24VDC
- Power Supply: 48V
- DRV8711EVM board
- Using most of the recommended settings from DRV8711 Quick Spin and Tuning Guide:
- Register Hex Value Settings
- 0x01 Torque 0x0180 Torque = 80
- 0x02 Off 0x0032 Internal indexer, 25 µs off time
- 0x03 Blank 0x0100 Adaptive blanking, 1-µs current blanking
- 0x04 Decay 0x0510 Use auto mixed decay, mixed decay time has no effect.
- 0x05 Stall 0x0A02 BEMF/8, Stall after 2, approximately 20 mV (without experimentation yet)
- 0x06 Drive 0x0000 Minimal drive, minimum OCP deglitch and threshold
- 0x00 Control 0xxxxx 850 ns dead time, gain of 10, internal stall detect, 1/128 step, enable motor
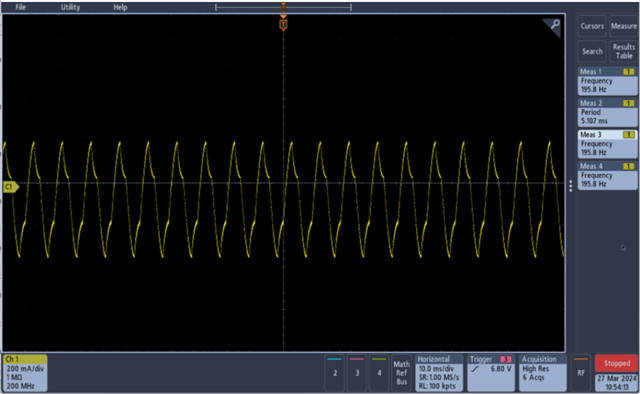
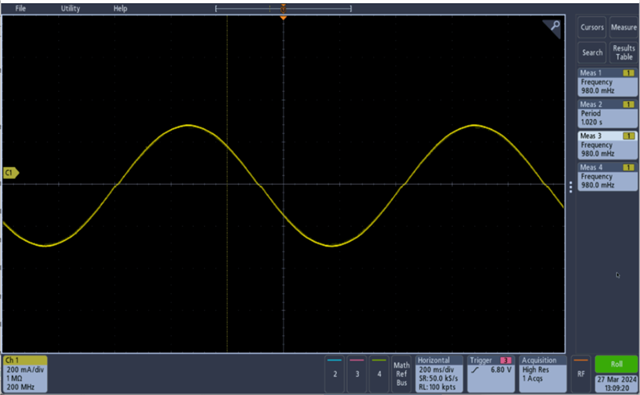
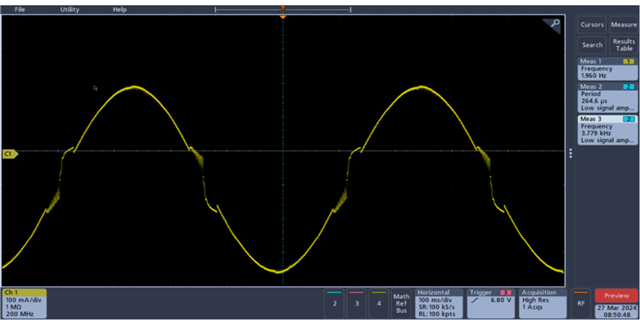
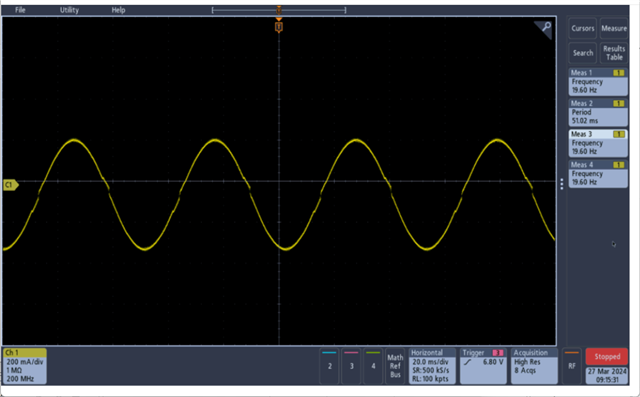
One winding current waveform are measured below at varying indexing speeds:
Period = 1000 us
Period = 100 us
Period = 10us