Hi,
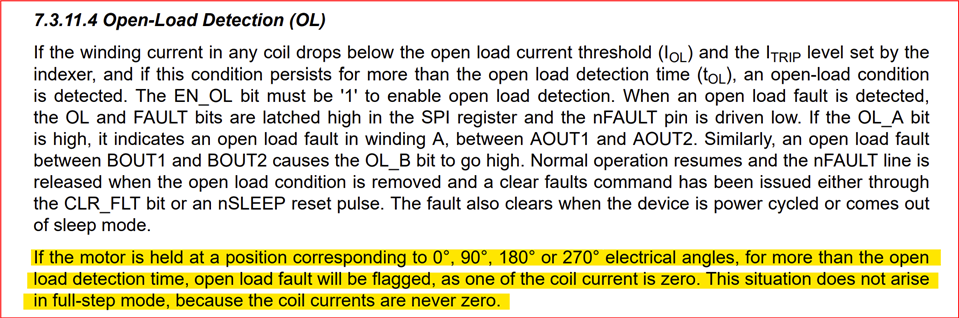
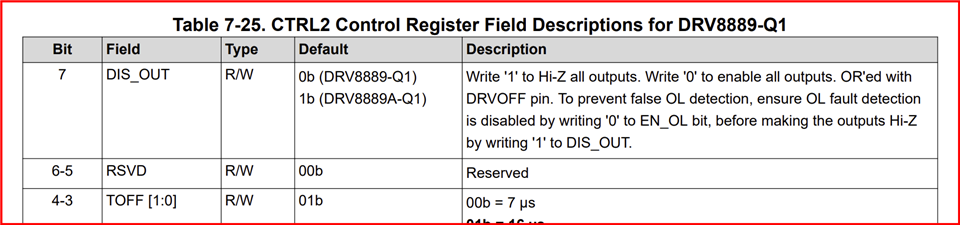
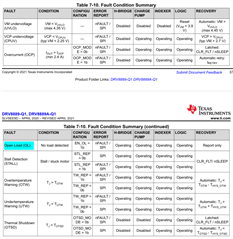
I used DRV8889 to drive the motor to rotate forward and then reverse immediately, and an Open Load Fault occurred. Test result is as below
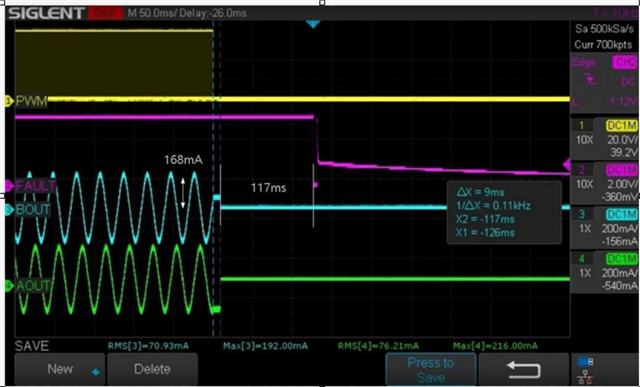
However, 200ms before the Fault occurs, the motor current is not lower than 30mA, which means that there is no condition to trigger Open Load.
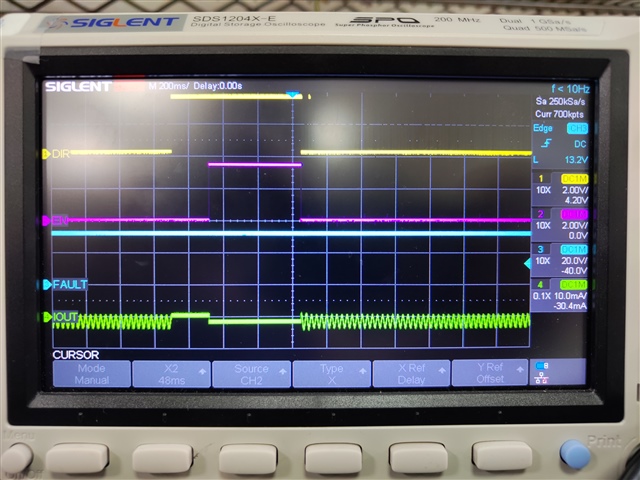
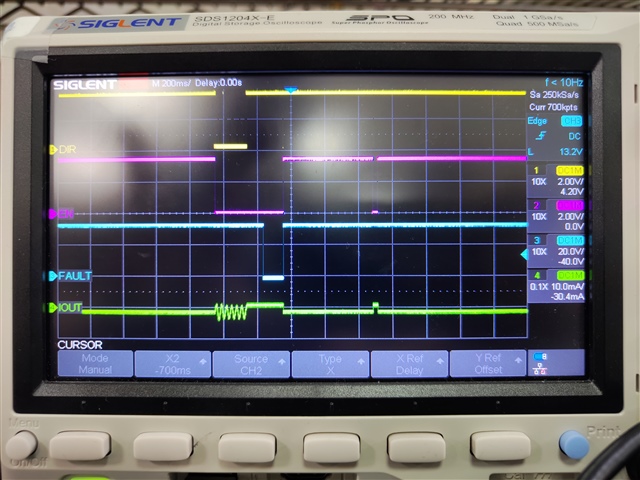
So I want to ask, what else might trigger Open Load?
It was confirmed through the SPI message that the FAULT pull Low was caused by Open Load, but there was no abnormality in the two sets of output currents of DRV8889. Is there any other phenomenon that may cause Open Load fault?
Thanks & best regards,