


Hello,
I am using DRV8434PWPR driver for driving bipolar 2 phase stepper motors with 1/64 microstepping for a camera.
The pan motor is being drived with 1.6 A peak current. The speed for the pan motor varies from 0.4 degrees/s to 960 degrees/second.
During low speeds I am seeing a non-smooth motion where the image starts moving and after a short while the image looks like it stops.
During this time I am constantly giving PWM signal but the motion looks like it stops for a really short time. Could this be caused by
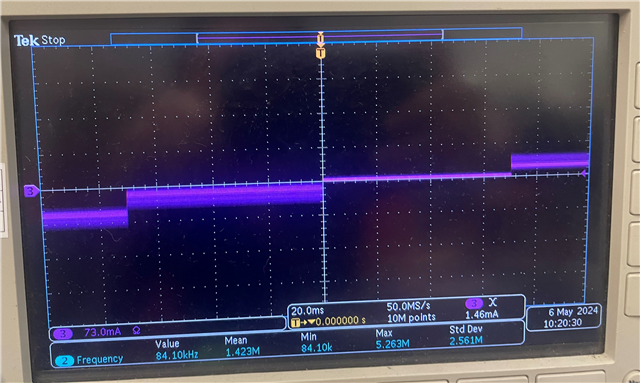
zero crossing error? According to my measurements zero crossing lasts about 70 miliseconds.
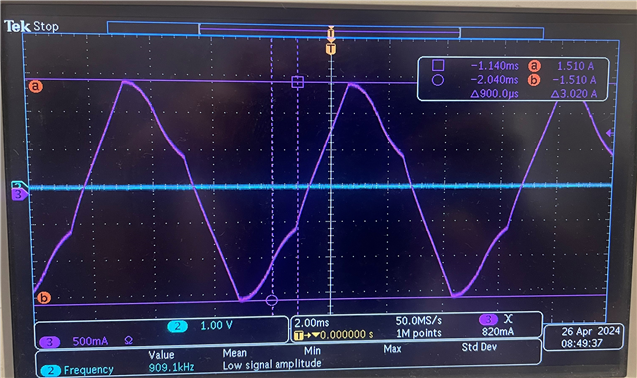
Also for higher speeds the current graph gets distorted and motor starts making noises. I am using smart tune dynamic decay with Toff = 7 microseconds.
Below are oscilloscope waveforms for the motor current (with highest speed and zero crossing for the lowest speed)
.
Thanks,
İrem

