Hi,
I have built a breakout that is very similar to the evaluation board and I can communicate with the controller over I2C. I set up the recommended default values and I can read them back.
When I try to start the MPET algorithm, I always get MPET_FAULT error. I searched the forum for a long time and tried many suggestions, but I cannot get the motor to start. Unfortunately, it does not have a datasheet, so I can only measure the Rph and Lph values and I also measured the Ke back EMF constant, so that I can skip the MPET algorithm. Still, after setting the measured values, the motor does not spin up, it only tries to start over and over again. I also tried to set Kp=10 and Ki=1, but still no success.
I'm using a a salvaged BLDC motor from a floppy drive, it has 3 pins with 4 pole pairs.
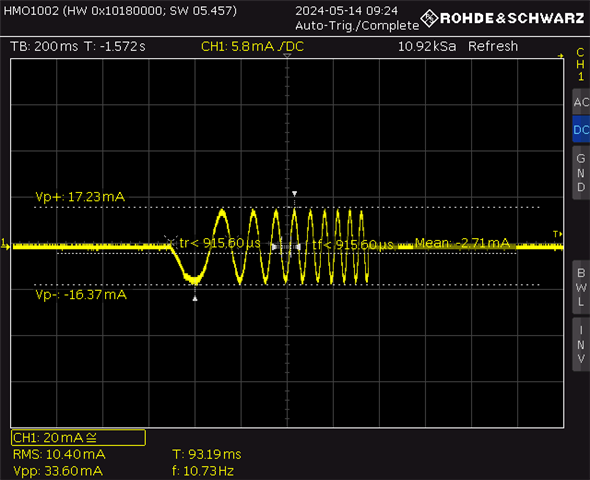
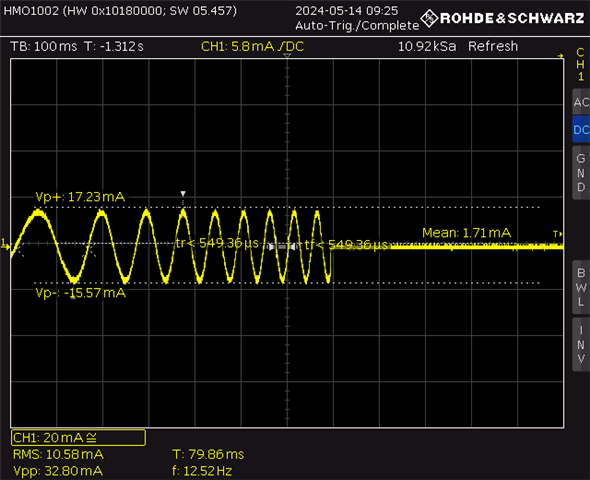
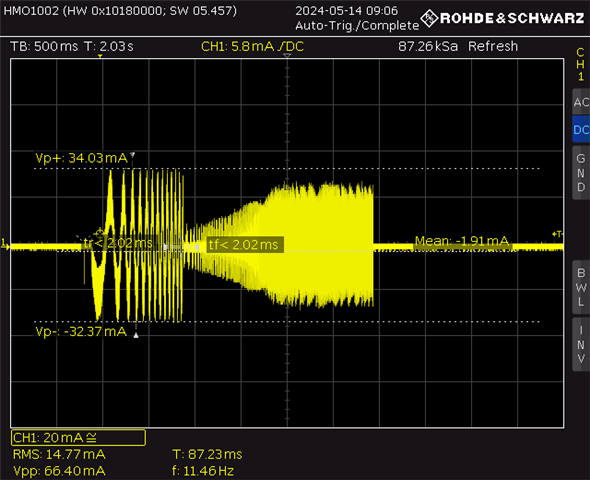
I measured the voltage on one of the phases and the signal looks like this:

Can you give me guidance on how to get the motor spinning?
Best regards,
Tibor