Other Parts Discussed in Thread: , MSP430FR2355
Tool/software:
Hello,
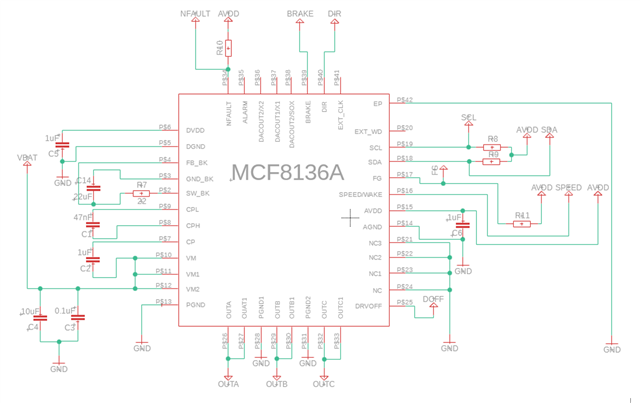
I have a question about MCF8316A. I want to use it without any uC. I made the diagram exactly as in the example from the data sheet as you can see in the picture above [R8, R9, R10, R11= 5.6koHm ]. The brake is connected to GND externally trough a 10k resistor and the Direction pin is connected to AVDD trough a 10k resistor. I have all the necessary voltages: AVDD=3.3V; DVDD=1.5V; Buck/LDO regulator in resistance mode=5V; CP=17V (VM=12V). I also plugged in the BLDC motor, a drone one [DJI mini-3], but is not spinning. What else should I do in this situation to spin the motor?