Other Parts Discussed in Thread: MCT8316Z, MCT8315Z,
Tool/software:
I have an application that requires that I rotate a 1kg load at between 0.5 and 2 revs per minute.
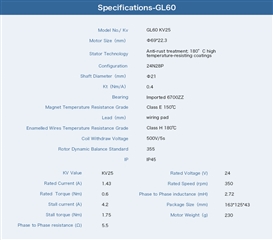
I have selected a Cubemars motor the GL60KV25 data sheet attached.
When I attempt to run the motor slowly I can get a staple speed down to 60RPM but when I go lower the speed is not stable could you advise me on how to approach this problem?