Tool/software:
Hi,
I just want to start with MCF8329EVM.
But the first step is to Load Preset Values, the button is disabled unless i choose the file from my drive. What file should i choose, is there a deafoult setup file that can be downloaded somewhere?
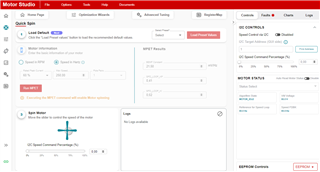
Or this is not the first step?
Is there any istruction how to go step by step?
Regards,
Adam