Other Parts Discussed in Thread: MCF8316A
Tool/software:
I have been trying to spin a 580KV 7-pole outrunner motor at the max RPM using a supply voltage of 21V. The max rpm should be well over 10K rpm, but it seems to hit a max speed limit of around 8400 rpm. Current is not an issue, The power supply can output 6A max and this is never reached anyway.
Motor specs: Coil resistance of 0.1Ohms, inductance of 0.03mH. No-load current is about 400mA average.
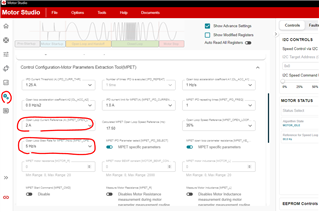
Test setup: MCF8316A EVM & Motor Studio. Speed control is over I2C. Default values loaded. If I try to run MPET, it fails. First of all, I cannot even enter the max. RPM or number of poles – selection is grayed out - unless I switch from “Speed in Hz” to “speed in RPM”. Then MPET seems to hang after properly determining resistance and inductance; so, it fails at the BEMF determination stage. The Algorithm state is : MOTOR MPET_KE_MEASURE. Faults are: DRIVER FAULT, OCP and OCP_LB.
Clearing the faults and manually entering the remaining values of BEMF of 9.4, Speed loop Kp of 0.4, Speed loop Ki of 0.9, will get the motor running. but only to the speed limit of around 8400 RPM as mentioned. This motor, when driver by another BLDC ESC (off-the-shelf QWinout Brushless ESC running SimonK firmware), can easily reach 10000RPM and beyond at 21 V.
I have tried multiple combinations of BEMG, Ki & KP.
Any ideas what on what configuration is required to spin the motor to the max speed?