


Part Number: MCF8329EVM
Tool/software:
Hi team,
Here is mmFAE Chris. I have the customer who supply to Laifen (bing.com/ck/a?!&&p=e227f65a1ef9f238JmltdHM9MTcyMTg2NTYwMCZpZ3VpZD0xZjJhYWM2Yy1mNTcwLTY2MmItMWM0YS1iODM5ZjQyYTY3NTQmaW5zaWQ9NTE4Ng&ptn=3&ver=2&hsh=3&fclid=1f2aac6c-f570-662b-1c4a-b839f42a6754&psq=laifeng&u=a1aHR0cHM6Ly93d3cubGFpZmVuLm5ldC8&ntb=1).
when i design MCF8329EVM for customer, questions are as follows:
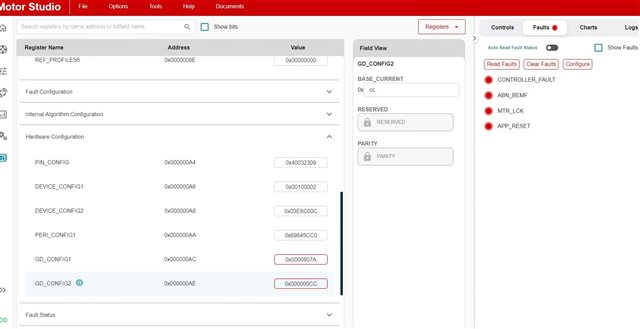
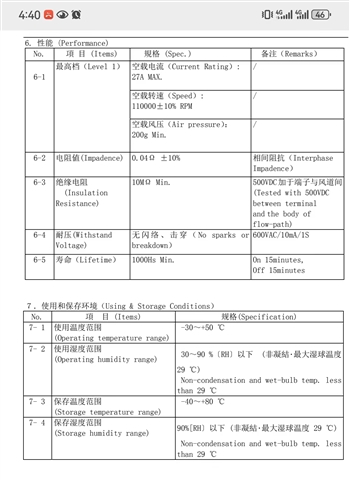
Customer feedback: the speed is too low. The customer's target motor speed is 130,000 rpm, but currently it is 10,000 rpm. and customer use triangle connection. Customer motor and motor studio as shown.
Can you give me some solutions for customers?
{
"signature":"oneui-register-data",
"data":[
[
{
"idx":0,
"id":"ISD_CONFIG",
"value":"0x6462AC20",
"addr":"0x00000080"
},
{
"idx":1,
"id":"REV_DRIVE_CONFIG",
"value":"0xA8200000",
"addr":"0x00000082"
},
{
"idx":2,
"id":"MOTOR_STARTUP1",
"value":"0x0D6748D0",
"addr":"0x00000084"
},
{
"idx":3,
"id":"MOTOR_STARTUP2",
"value":"0xB4A26007",
"addr":"0x00000086"
},
{
"idx":4,
"id":"CLOSED_LOOP1",
"value":"0x124191B8",
"addr":"0x00000088"
},
{
"idx":5,
"id":"CLOSED_LOOP2",
"value":"0x8BAD4512",
"addr":"0x0000008A"
},
{
"idx":6,
"id":"CLOSED_LOOP3",
"value":"0x1BE21882",
"addr":"0x0000008C"
},
{
"idx":7,
"id":"CLOSED_LOOP4",
"value":"0x739D6710",
"addr":"0x0000008E"
},
{
"idx":8,
"id":"REF_PROFILES1",
"value":"0x00000000",
"addr":"0x00000094"
},
{
"idx":9,
"id":"REF_PROFILES2",
"value":"0x00000000",
"addr":"0x00000096"
},
{
"idx":10,
"id":"REF_PROFILES3",
"value":"0x00000000",
"addr":"0x00000098"
},
{
"idx":11,
"id":"REF_PROFILES4",
"value":"0x800D0000",
"addr":"0x0000009A"
},
{
"idx":12,
"id":"REF_PROFILES5",
"value":"0x00000000",
"addr":"0x0000009C"
},
{
"idx":13,
"id":"REF_PROFILES6",
"value":"0x00000000",
"addr":"0x0000009E"
}
],
[
{
"idx":0,
"id":"FAULT_CONFIG1",
"value":"0xB6E54226",
"addr":"0x00000090"
},
{
"idx":1,
"id":"FAULT_CONFIG2",
"value":"0xF1C6A888",
"addr":"0x00000092"
}
],
[
{
"idx":0,
"id":"INT_ALGO_1",
"value":"0xA433417D",
"addr":"0x000000A0"
},
{
"idx":1,
"id":"INT_ALGO_2",
"value":"0x0000028F",
"addr":"0x000000A2"
}
],
[
{
"idx":0,
"id":"PIN_CONFIG",
"value":"0x0B000020",
"addr":"0x000000A4"
},
{
"idx":1,
"id":"DEVICE_CONFIG1",
"value":"0x00101462",
"addr":"0x000000A6"
},
{
"idx":2,
"id":"DEVICE_CONFIG2",
"value":"0x03E8C00C",
"addr":"0x000000A8"
},
{
"idx":3,
"id":"PERI_CONFIG1",
"value":"0xE9C01F30",
"addr":"0x000000AA"
},
{
"idx":4,
"id":"GD_CONFIG1",
"value":"0x9C450103",
"addr":"0x000000AC"
},
{
"idx":5,
"id":"GD_CONFIG2",
"value":"0x00000400",
"addr":"0x000000AE"
}
],
[
{
"idx":0,
"id":"GATE_DRIVER_FAULT_STATUS",
"value":"0x00000000",
"addr":"0x000000E0"
},
{
"idx":1,
"id":"CONTROLLER_FAULT_STATUS",
"value":"0x00000000",
"addr":"0x000000E2"
}
],
[
{
"idx":0,
"id":"ALGO_STATUS",
"value":"0x428D8514",
"addr":"0x000000E4"
},
{
"idx":1,
"id":"MTR_PARAMS",
"value":"0x00370000",
"addr":"0x000000E6"
},
{
"idx":2,
"id":"ALGO_STATUS_MPET",
"value":"0x2A000000",
"addr":"0x000000E8"
}
],
[
{
"idx":0,
"id":"ALGO_CTRL1",
"value":"0x20000000",
"addr":"0x000000EA"
}
],
[
{
"idx":0,
"id":"ALGO_DEBUG1",
"value":"0x80000000",
"addr":"0x000000EC"
},
{
"idx":1,
"id":"ALGO_DEBUG2",
"value":"0x00000000",
"addr":"0x000000EE"
},
{
"idx":2,
"id":"CURRENT_PI",
"value":"0x028403CA",
"addr":"0x000000F0"
},
{
"idx":3,
"id":"SPEED_PI",
"value":"0x00000000",
"addr":"0x000000F2"
},
{
"idx":4,
"id":"DAC_1",
"value":"0x00000000",
"addr":"0x000000F4"
}
],
[
{
"idx":0,
"id":"ALGORITHM_STATE",
"value":"0x00200009",
"addr":"0x00000196"
},
{
"idx":1,
"id":"FG_SPEED_FDBK",
"value":"0x02760E8C",
"addr":"0x0000019C"
},
{
"idx":2,
"id":"BUS_CURRENT",
"value":"0x00AD89BC",
"addr":"0x0000040E"
},
{
"idx":3,
"id":"PHASE_CURRENT_A",
"value":"0x00070000",
"addr":"0x0000043C"
},
{
"idx":4,
"id":"PHASE_CURRENT_B",
"value":"0x00090000",
"addr":"0x0000043E"
},
{
"idx":5,
"id":"PHASE_CURRENT_C",
"value":"0x00020000",
"addr":"0x00000440"
},
{
"idx":6,
"id":"CSA_GAIN_FEEDBACK",
"value":"0x00000000",
"addr":"0x00000450"
},
{
"idx":7,
"id":"VOLTAGE_GAIN_FEEDBACK",
"value":"0x00000001",
"addr":"0x00000458"
},
{
"idx":8,
"id":"VM_VOLTAGE",
"value":"0x022F0000",
"addr":"0x0000045C"
},
{
"idx":9,
"id":"PHASE_VOLTAGE_VA",
"value":"0x0006ED9E",
"addr":"0x00000460"
},
{
"idx":10,
"id":"PHASE_VOLTAGE_VB",
"value":"0x0006ED9E",
"addr":"0x00000462"
},
{
"idx":11,
"id":"PHASE_VOLTAGE_VC",
"value":"0x000986BA",
"addr":"0x00000464"
},
{
"idx":12,
"id":"SIN_COMMUTATION_ANGLE",
"value":"0xFE321F16",
"addr":"0x000004AA"
},
{
"idx":13,
"id":"COS_COMMUTATION_ANGLE",
"value":"0x07C9945C",
"addr":"0x000004AC"
},
{
"idx":14,
"id":"IALPHA",
"value":"0xFF6C0000",
"addr":"0x000004CC"
},
{
"idx":15,
"id":"IBETA",
"value":"0xFF8B6010",
"addr":"0x000004CE"
},
{
"idx":16,
"id":"VALPHA",
"value":"0xFFE1E121",
"addr":"0x000004D0"
},
{
"idx":17,
"id":"VBETA",
"value":"0xFFCD3BB9",
"addr":"0x000004D2"
},
{
"idx":18,
"id":"ID",
"value":"0xFF86DCE5",
"addr":"0x000004DC"
},
{
"idx":19,
"id":"IQ",
"value":"0xFF6FB9AC",
"addr":"0x000004DE"
},
{
"idx":20,
"id":"VD",
"value":"0xFF7D58FE",
"addr":"0x000004E0"
},
{
"idx":21,
"id":"VQ",
"value":"0x00FF43F3",
"addr":"0x000004E2"
},
{
"idx":22,
"id":"IQ_REF_ROTOR_ALIGN",
"value":"0xFF333638",
"addr":"0x0000051A"
},
{
"idx":23,
"id":"SPEED_REF_OPEN_LOOP",
"value":"0xFE53FA7A",
"addr":"0x00000532"
},
{
"idx":24,
"id":"IQ_REF_OPEN_LOOP",
"value":"0xFECDA308",
"addr":"0x00000542"
},
{
"idx":25,
"id":"SPEED_REF_CLOSED_LOOP",
"value":"0x0428E000",
"addr":"0x000005D0"
},
{
"idx":26,
"id":"ID_REF_CLOSED_LOOP",
"value":"0x00000000",
"addr":"0x0000060A"
},
{
"idx":27,
"id":"IQ_REF_CLOSED_LOOP",
"value":"0xFF5577B9",
"addr":"0x0000060C"
},
{
"idx":28,
"id":"ISD_STATE",
"value":"0x00000005",
"addr":"0x000006B0"
},
{
"idx":29,
"id":"ISD_SPEED",
"value":"0x00000979",
"addr":"0x000006BA"
},
{
"idx":30,
"id":"IPD_STATE",
"value":"0x00000000",
"addr":"0x000006E4"
},
{
"idx":31,
"id":"IPD_ANGLE",
"value":"0x00000000",
"addr":"0x0000071A"
},
{
"idx":32,
"id":"ED",
"value":"0x0000E31D",
"addr":"0x0000075C"
},
{
"idx":33,
"id":"EQ",
"value":"0xFFDA52C9",
"addr":"0x0000075E"
},
{
"idx":34,
"id":"SPEED_FDBK",
"value":"0x0248EF06",
"addr":"0x0000076E"
},
{
"idx":35,
"id":"THETA_EST",
"value":"0xD7ACFA26",
"addr":"0x00000774"
}
]
]
}
thank you
Chris
