Tool/software:
Hi,
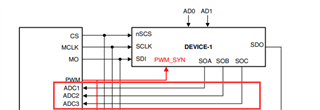
We use the DRV8311 for the BLDC which used for the drone gimbal, please refer to below screenshot, we want to know if we don't connect the SOA/SOB/SOC to MCU ADC because our MCU has no eought ADC resource,
plesae advise if this is available? BTW, if we can consider to use the SPI to read the register to get the circuit sense data, thanks.
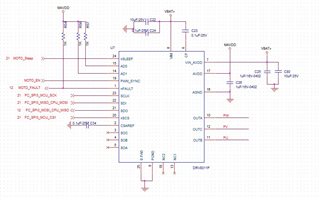
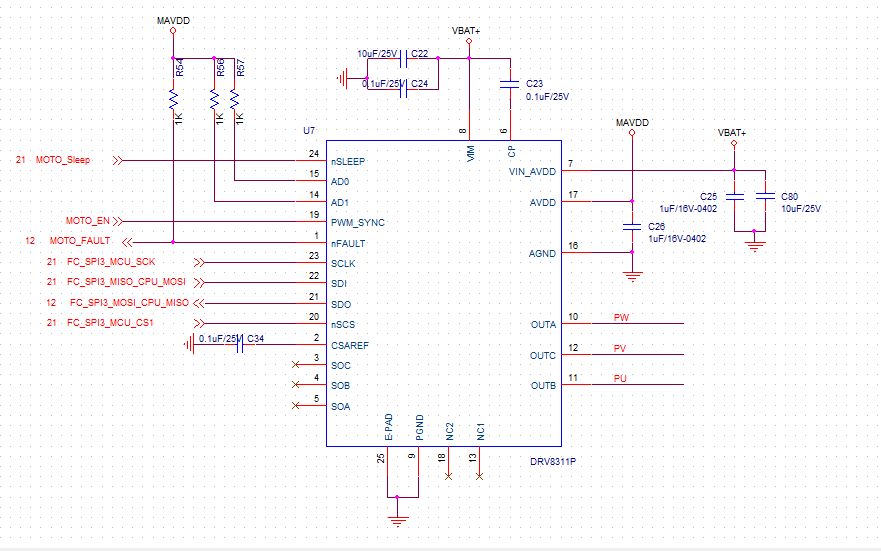
Plesae also review our schematci diagram, thanks.