Other Parts Discussed in Thread: MCF8316A
Tool/software:
Hi TI,
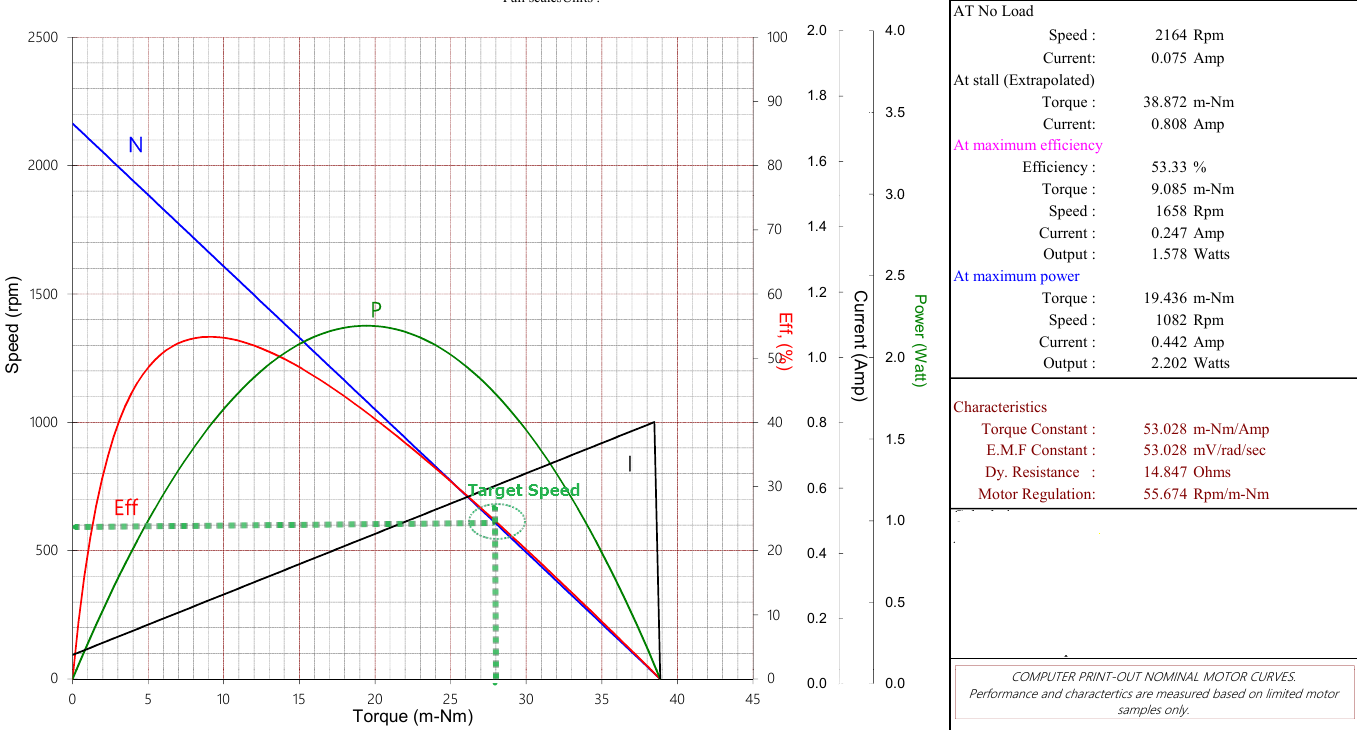
The motor mentioned in the ralated thread arrived, its parameters the motor supplier provides are as following:
Wire Resistance: 11.5Ω
Wire Inductance: 4.7uH
BEMF Constant: 53.028 mV/rad/sec=around 333mV/Hz
Poles: 12
Format: wye-connected
And its performance curve is attached again here:
(1)In the Quick Spin, used the default .json file as the following:
{
"signature":"oneui-register-data",
"data":[
[
{
"idx":0,
"id":"ISD_CONFIG",
"value":"0x6C230C3C",
"addr":"0x00000080"
},
{
"idx":1,
"id":"REV_DRIVE_CONFIG",
"value":"0xA8200000",
"addr":"0x00000082"
},
{
"idx":2,
"id":"MOTOR_STARTUP1",
"value":"0x6568C700",
"addr":"0x00000084"
},
{
"idx":3,
"id":"MOTOR_STARTUP2",
"value":"0x9A82200D",
"addr":"0x00000086"
},
{
"idx":4,
"id":"CLOSED_LOOP1",
"value":"0x0E3191BD",
"addr":"0x00000088"
},
{
"idx":5,
"id":"CLOSED_LOOP2",
"value":"0x99E59091",
"addr":"0x0000008A"
},
{
"idx":6,
"id":"CLOSED_LOOP3",
"value":"0x30800002",
"addr":"0x0000008C"
},
{
"idx":7,
"id":"CLOSED_LOOP4",
"value":"0x298A84B0",
"addr":"0x0000008E"
},
{
"idx":8,
"id":"REF_PROFILES1",
"value":"0x00000000",
"addr":"0x00000094"
},
{
"idx":9,
"id":"REF_PROFILES2",
"value":"0x00000000",
"addr":"0x00000096"
},
{
"idx":10,
"id":"REF_PROFILES3",
"value":"0x00000000",
"addr":"0x00000098"
},
{
"idx":11,
"id":"REF_PROFILES4",
"value":"0x00000000",
"addr":"0x0000009A"
},
{
"idx":12,
"id":"REF_PROFILES5",
"value":"0x00000000",
"addr":"0x0000009C"
},
{
"idx":13,
"id":"REF_PROFILES6",
"value":"0x00000000",
"addr":"0x0000009E"
}
],
[
{
"idx":0,
"id":"FAULT_CONFIG1",
"value":"0xA6EA4326",
"addr":"0x00000090"
},
{
"idx":1,
"id":"FAULT_CONFIG2",
"value":"0xFF0220B8",
"addr":"0x00000092"
}
],
[
{
"idx":0,
"id":"INT_ALGO_1",
"value":"0xA43141BD",
"addr":"0x000000A0"
},
{
"idx":1,
"id":"INT_ALGO_2",
"value":"0x000001A3",
"addr":"0x000000A2"
}
],
[
{
"idx":0,
"id":"PIN_CONFIG",
"value":"0x08000000",
"addr":"0x000000A4"
},
{
"idx":1,
"id":"DEVICE_CONFIG1",
"value":"0x00101465",
"addr":"0x000000A6"
},
{
"idx":2,
"id":"DEVICE_CONFIG2",
"value":"0xC0003107",
"addr":"0x000000A8"
},
{
"idx":3,
"id":"PERI_CONFIG1",
"value":"0x81E81F00",
"addr":"0x000000AA"
},
{
"idx":4,
"id":"GD_CONFIG1",
"value":"0x00000000",
"addr":"0x000000AC"
},
{
"idx":5,
"id":"GD_CONFIG2",
"value":"0x00000000",
"addr":"0x000000AE"
}
],
[
{
"idx":0,
"id":"GATE_DRIVER_FAULT_STATUS",
"value":"0x00000000",
"addr":"0x000000E0"
},
{
"idx":1,
"id":"CONTROLLER_FAULT_STATUS",
"value":"0x00000000",
"addr":"0x000000E2"
}
],
[
{
"idx":0,
"id":"ALGO_STATUS",
"value":"0x27A60004",
"addr":"0x000000E4"
},
{
"idx":1,
"id":"MTR_PARAMS",
"value":"0x90619100",
"addr":"0x000000E6"
},
{
"idx":2,
"id":"ALGO_STATUS_MPET",
"value":"0xE1000000",
"addr":"0x000000E8"
}
],
[
{
"idx":0,
"id":"ALGO_CTRL1",
"value":"0x00000000",
"addr":"0x000000EA"
}
],
[
{
"idx":0,
"id":"ALGO_DEBUG1",
"value":"0x80000000",
"addr":"0x000000EC"
},
{
"idx":1,
"id":"ALGO_DEBUG2",
"value":"0x00000000",
"addr":"0x000000EE"
},
{
"idx":2,
"id":"CURRENT_PI",
"value":"0x012D012E",
"addr":"0x000000F0"
},
{
"idx":3,
"id":"SPEED_PI",
"value":"0x022A012A",
"addr":"0x000000F2"
},
{
"idx":4,
"id":"DAC_1",
"value":"0x00000000",
"addr":"0x000000F4"
},
{
"idx":5,
"id":"DAC_2",
"value":"0x00000000",
"addr":"0x000000F6"
}
],
[
{
"idx":0,
"id":"ALGORITHM_STATE",
"value":"0x00000000",
"addr":"0x00000190"
},
{
"idx":1,
"id":"FG_SPEED_FDBK",
"value":"0x0400EC20",
"addr":"0x00000196"
},
{
"idx":2,
"id":"BUS_CURRENT",
"value":"0x00000000",
"addr":"0x00000410"
},
{
"idx":3,
"id":"PHASE_CURRENT_A",
"value":"0x000A0000",
"addr":"0x00000440"
},
{
"idx":4,
"id":"PHASE_CURRENT_B",
"value":"0xFFFA0000",
"addr":"0x00000442"
},
{
"idx":5,
"id":"PHASE_CURRENT_C",
"value":"0x00000000",
"addr":"0x00000444"
},
{
"idx":6,
"id":"CSA_GAIN_FEEDBACK",
"value":"0x00000003",
"addr":"0x00000468"
},
{
"idx":7,
"id":"VOLTAGE_GAIN_FEEDBACK",
"value":"0x00000002",
"addr":"0x00000472"
},
{
"idx":8,
"id":"VM_VOLTAGE",
"value":"0x00000000",
"addr":"0x00000476"
},
{
"idx":9,
"id":"PHASE_VOLTAGE_VA",
"value":"0x0000376C",
"addr":"0x0000047A"
},
{
"idx":10,
"id":"PHASE_VOLTAGE_VB",
"value":"0x0000376C",
"addr":"0x0000047C"
},
{
"idx":11,
"id":"PHASE_VOLTAGE_VC",
"value":"0x0001F2D4",
"addr":"0x0000047E"
},
{
"idx":12,
"id":"SIN_COMMUTATION_ANGLE",
"value":"0x07E7B288",
"addr":"0x000004B6"
},
{
"idx":13,
"id":"COS_COMMUTATION_ANGLE",
"value":"0x0128ADF9",
"addr":"0x000004B8"
},
{
"idx":14,
"id":"IALPHA",
"value":"0x000A8000",
"addr":"0x000004D2"
},
{
"idx":15,
"id":"IBETA",
"value":"0x0054DED8",
"addr":"0x000004D4"
},
{
"idx":16,
"id":"VALPHA",
"value":"0xFF83F708",
"addr":"0x000004D6"
},
{
"idx":17,
"id":"VBETA",
"value":"0x000EE48C",
"addr":"0x000004D8"
},
{
"idx":18,
"id":"ID",
"value":"0x00556269",
"addr":"0x000004E2"
},
{
"idx":19,
"id":"IQ",
"value":"0x0001EB50",
"addr":"0x000004E4"
},
{
"idx":20,
"id":"VD",
"value":"0xFFFCBD4D",
"addr":"0x000004E6"
},
{
"idx":21,
"id":"VQ",
"value":"0x007D0BEC",
"addr":"0x000004E8"
},
{
"idx":22,
"id":"IQ_REF_ROTOR_ALIGN",
"value":"0x00000000",
"addr":"0x00000524"
},
{
"idx":23,
"id":"SPEED_REF_OPEN_LOOP",
"value":"0x00000000",
"addr":"0x0000053C"
},
{
"idx":24,
"id":"IQ_REF_OPEN_LOOP",
"value":"0x0CCC9C80",
"addr":"0x0000054C"
},
{
"idx":25,
"id":"SPEED_REF_CLOSED_LOOP",
"value":"0x00000000",
"addr":"0x000005D4"
},
{
"idx":26,
"id":"ID_REF_CLOSED_LOOP",
"value":"0x00000000",
"addr":"0x00000606"
},
{
"idx":27,
"id":"IQ_REF_CLOSED_LOOP",
"value":"0x00000000",
"addr":"0x00000608"
},
{
"idx":28,
"id":"ISD_STATE",
"value":"0x00000000",
"addr":"0x00000682"
},
{
"idx":29,
"id":"ISD_SPEED",
"value":"0x00000000",
"addr":"0x0000068C"
},
{
"idx":30,
"id":"IPD_STATE",
"value":"0x00000000",
"addr":"0x000006C0"
},
{
"idx":31,
"id":"IPD_ANGLE",
"value":"0x00000000",
"addr":"0x00000704"
},
{
"idx":32,
"id":"ED",
"value":"0x00000000",
"addr":"0x0000074A"
},
{
"idx":33,
"id":"EQ",
"value":"0x00000000",
"addr":"0x0000074C"
},
{
"idx":34,
"id":"SPEED_FDBK",
"value":"0x00000000",
"addr":"0x0000075A"
},
{
"idx":35,
"id":"THETA_EST",
"value":"0x00000000",
"addr":"0x0000075E"
}
]
]
}
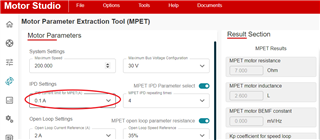
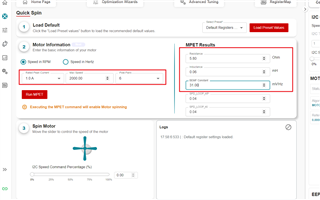
Then set
-Rated Peak Current: 1A
-Max Speed: 2000
-Pole Pairs: 6
And run MPET, "MPET_IPD_FAULT" was triggered, and the motor could not rotate normal.
[Q-1]What's the reason for this issue?
(2)Then I input the motor parameters by manual:
[Q-2]The minimum value for the inductance is 0.06mH, the motor's inductance is only around 2.35uH, is there any problem to set 0.06mH here? Could MCF8316C support this type of motor with so small inductance?
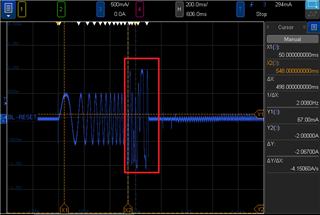
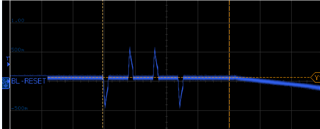
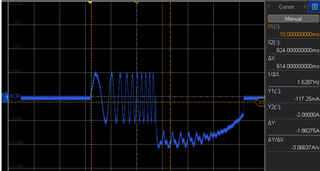
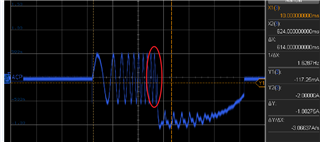
And set the I2C Speed Command Percentage to 50% directy, the motor could start up, but after a while it stopped with "ABN_BEMF"&"MTR_LCK" triggered. Then these fault were cleared automatically and the motor started up again. This process would repeated serveral times, and the motor could not rotate normal, and felt hot when touched after running for around 3 minutes.

(3)I tried to change the BEMF Constant to a lower value such as 30. The start-up was slow(around 3 seconds) and the motor shaked slightly, then roated normal at the target speed.
[Q-3]What's the reason for the different performance between 333(which is the value the motor supplier gave) and 30?
Thanks,
Alex