Tool/software:
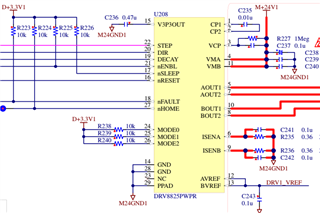
We using PDRV8825WPR stepper motor control driver. I found a old thread it has looks complete same.
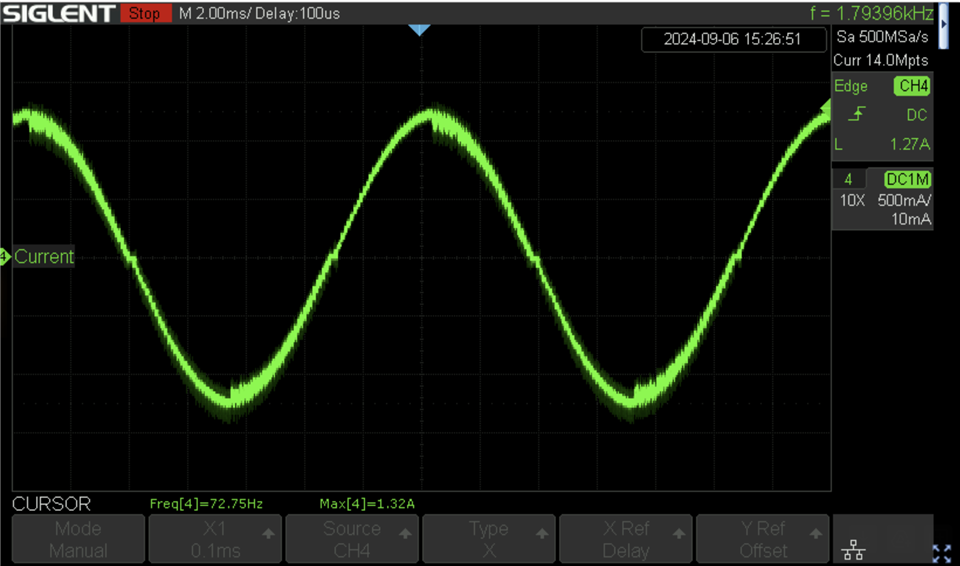
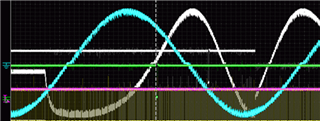
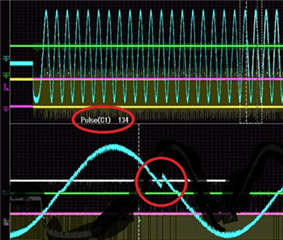
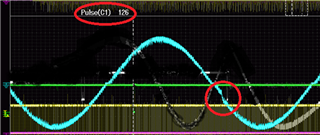
We have two lots, old one is complete OK however new lot has problem. Almost half has "Step loss problem". We check all signal and adjusted "Decay Mode" also . The symptoms happened only new lot. We always buy from authorized dealers.
Mr. Huiqi Li, please let me know what was loot problem and how to solved, if you look my thread.
Best regards
Ted Suzuki