Tool/software:
Hi All,
I am evaluating the above IC for sensorless position control of a small (8mmx16mm size coreless) brushed motor, which is coupled to a planetary gearbox.
I am strugling to get reliable position control, with the reported number of counts changing dramatically based on load.
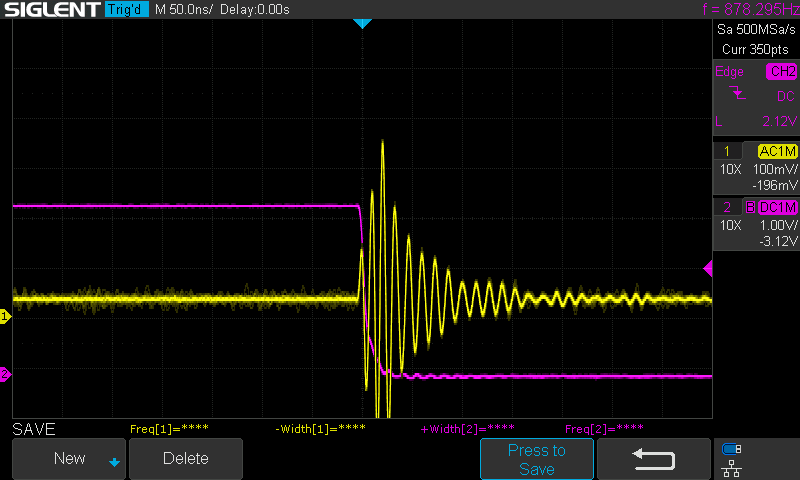
I am also seeing a lot of noise on IPROPI.
The EVM is in its factory state, with no modifications. VM is 3V, motor current is below 100mA
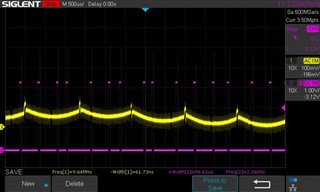
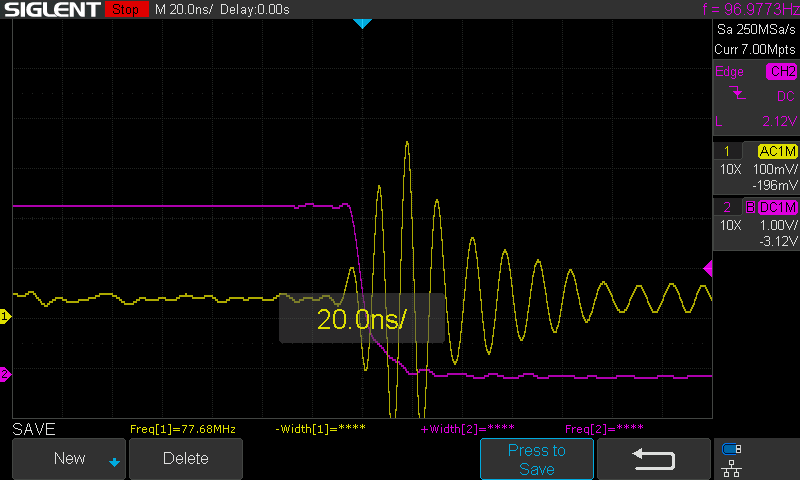
IPROPI and RC_OUT waveforms, EC enabled:

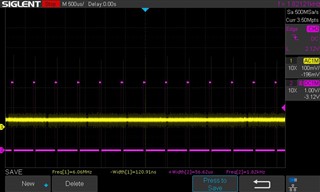
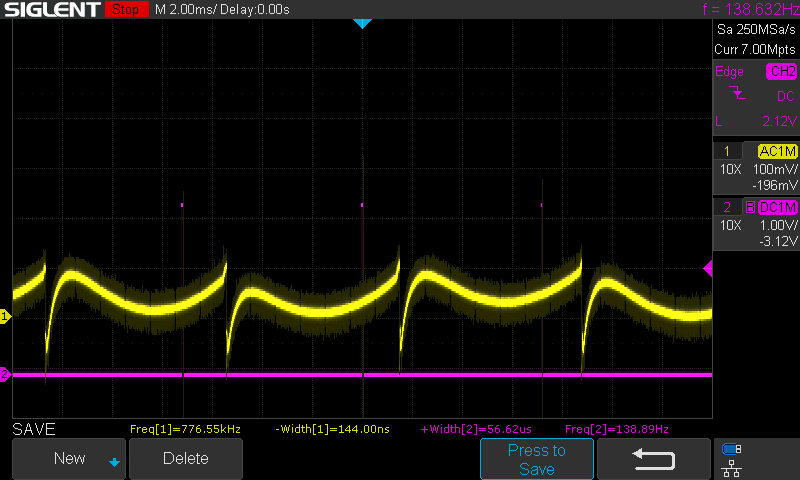
As above, but with EC disabled:
Any advice would be greatly appreciated.