Other Parts Discussed in Thread: MCF8316AEVM, MCF8329A, , MOTORSTUDIO
Tool/software:
Hi team,
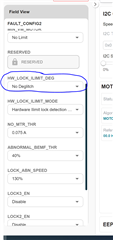
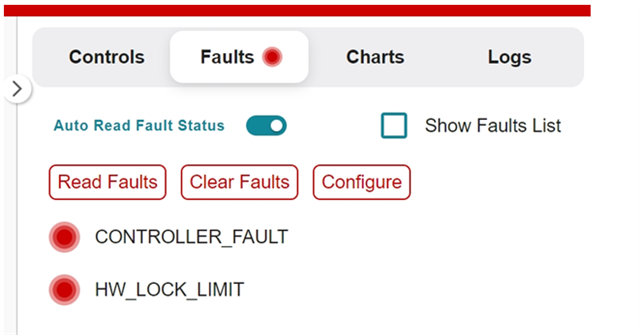
We use MCF8316AEVM for debugging. When the maximum phase current of the motor is about 6A, the hardware fault HW_LOCK_LIMIT is reported;
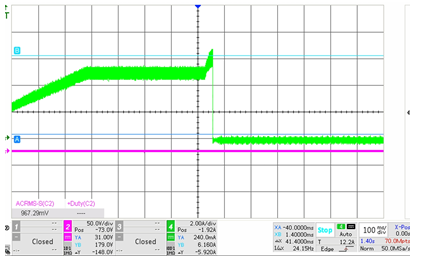
The verification method is as follows: use the Align positioning method, the positioning current is 5.5A, the openl_oop_cunrrent_limit is limited to 6 A, after the positioning is completed, the hardware overcurrent is set to 8A, and the HW_LOCK_LIMIT is reported in the open loop stage;
The current loop parameters use KP: 0; Ki: 0 and KP: 2; Ki: 8200; two sets of parameters, and the performance is consistent. Hardware overcurrent occurs only when the phase maximum is about 6A. At present, only the current at the moment of open-loop positioning verifies that there is overcurrent, and whether the trigger current value is smaller after the closed loop.
Need help:
1. Since the maximum phase current of our company's products is about 7A, please help evaluate whether the chip is applicable. If it is not applicable, please provide suggested current range?
2. If this phenomenon is a debugging problem, can you point out the solutions
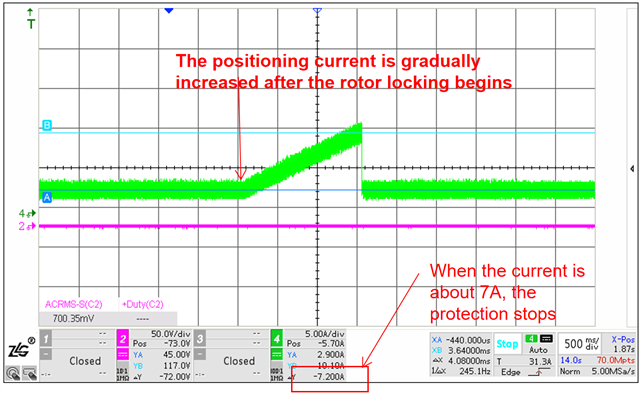
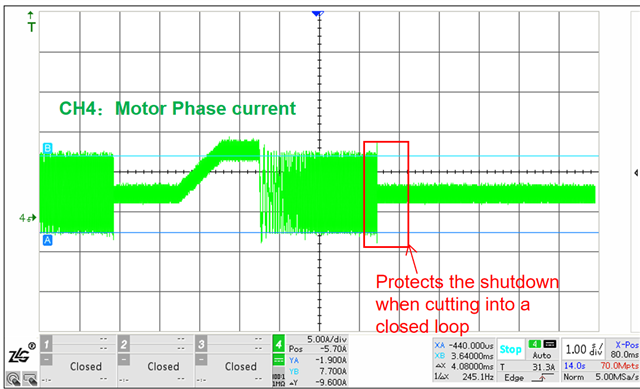
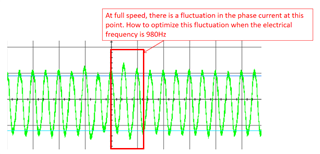
Fault picture:

Phase current waveform at the time of fault: the peak maximum value is only 6A.
Best regards!
Ethan