Other Parts Discussed in Thread: MSP430FR2355, MCF8316A
Tool/software:
hello
i am using motor studio to in order to use MCF8316AEVM.
when you first activate to program it finds the evb then i press proceeds and follow the instructions [POT position and jumper setting]
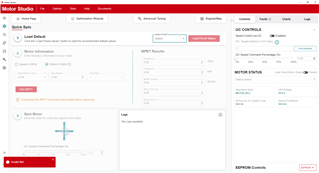
when i reach to the next step i am stuck with this screen
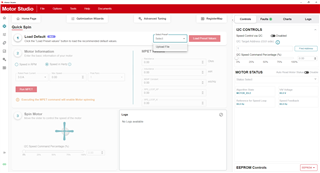
it says to press default values but the button is not enabled
what should i do?
and also what should i do with the firmware? which firmware do i need? where do i load it?
thank you,
Amir