Other Parts Discussed in Thread: CSD18512Q5B
Tool/software:
Hello Team,
We are utilizing the CSA output analog voltage information from the motor driver (DRV8705S), converting it to digital using the MCU (STM32) ADC, and determining whether the current exceeds the set threshold.
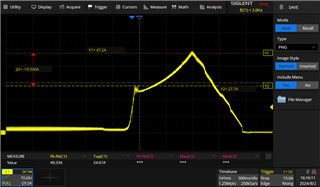
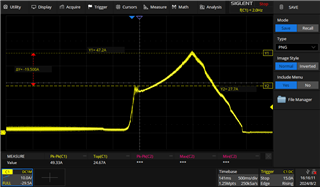
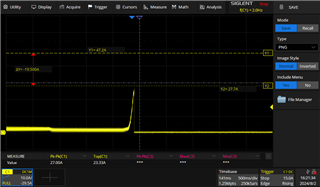
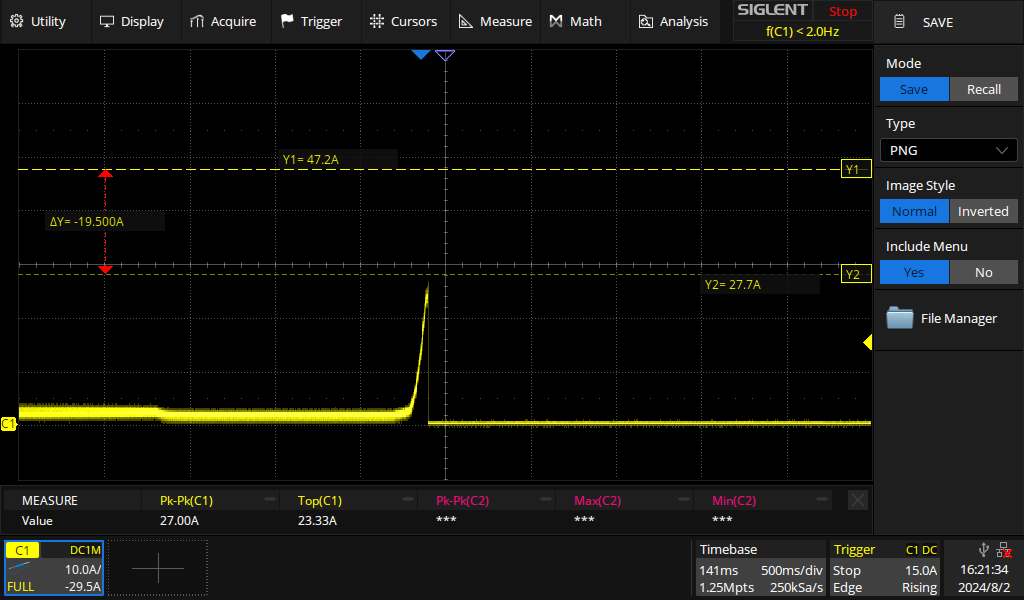
Currently, we have configured a 15A current threshold in the MCU firmware using the internal ADC. When the motor crosses this threshold, we observe an overcurrent trigger; however, during this event, the motor current peaks at 49A before the driver shuts off. Below is the overcurrent waveform of the motor.
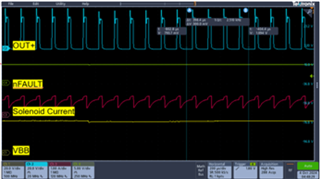
Also, currently in firmware we have set the VDS threshold to 0.12V, but when we attempt to lower the VDS threshold to 0.10V, the motor gets stuck.
Is there any other option to reduce this peak current? We want the driver to shut off below 20A, as our motors are rated for 15A.