Tool/software:
Hello, I am having the following problems with the MCF8316A driver motor:
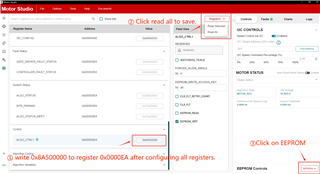
1. is it possible to use Motor Studio to write EEPROM directly through USB connecting computer and MCF8316A driver board, so that the driver board can run independently after re-powering?
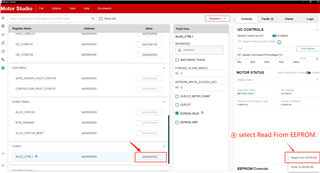
2. If it is possible to write, what are the specific operation steps?
3. After writing EEPROM, how to verify that it has been written?
4. How to change the motor speed after independent operation?