Other Parts Discussed in Thread: MSP430FR2355, MCT8329A, , MCF8329A
Tool/software:
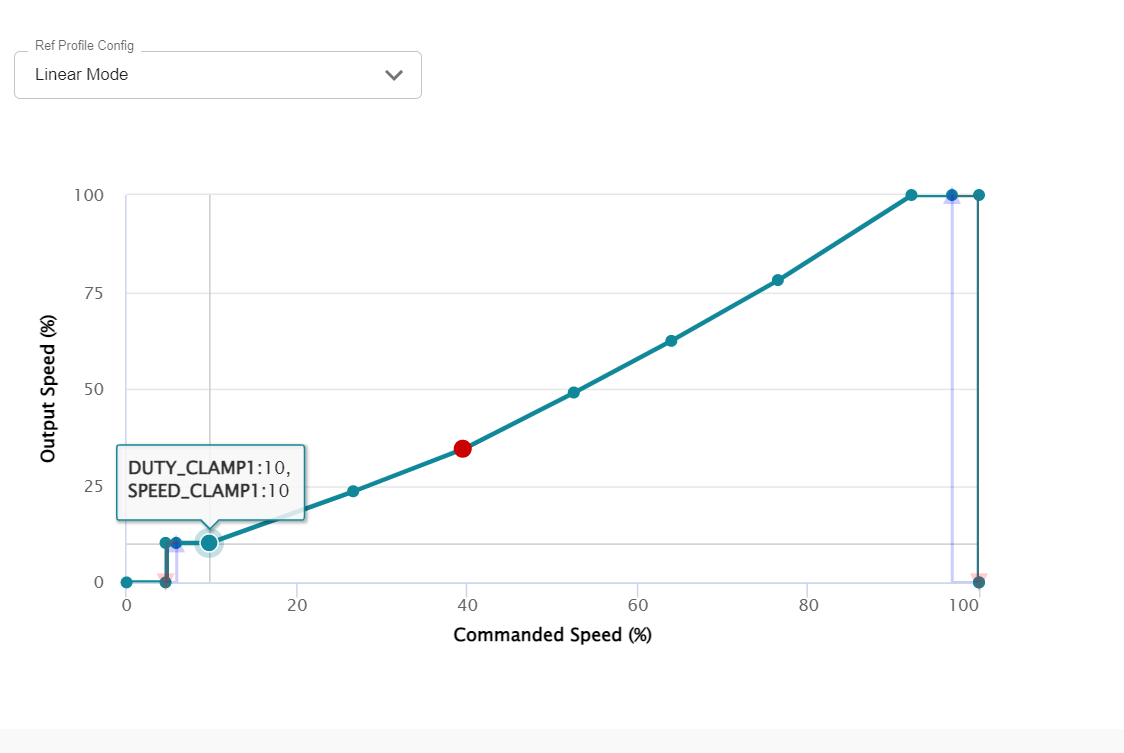
I want to control the speed input using RC transmitter. I tried with that, but it is not going to the maximum speed as like I2C. In GUI maximum frequency for speed input is like 10Hz to 325Hz. How to get the maximum speed?