Other Parts Discussed in Thread: MCF8316A
Tool/software:
Hello.
I'm having a new problem with testing motors.
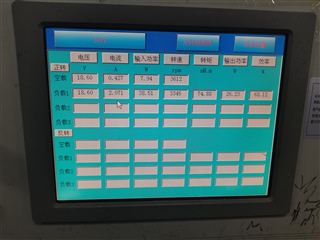
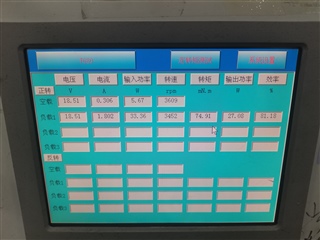
In this graph you can see that our motor efficiency is only 68%, but when we use other driver boards we can reach 80%, so we think that this result is because we didn't debug accurately with motor studio.
So here are few questions that I would like to ask:
1. how can I improve the motor efficiency (no problems with the test equipment and motor)?
2. what are the factors that are causing my load speed to not reach the desired speed (I'm using closed loop)?
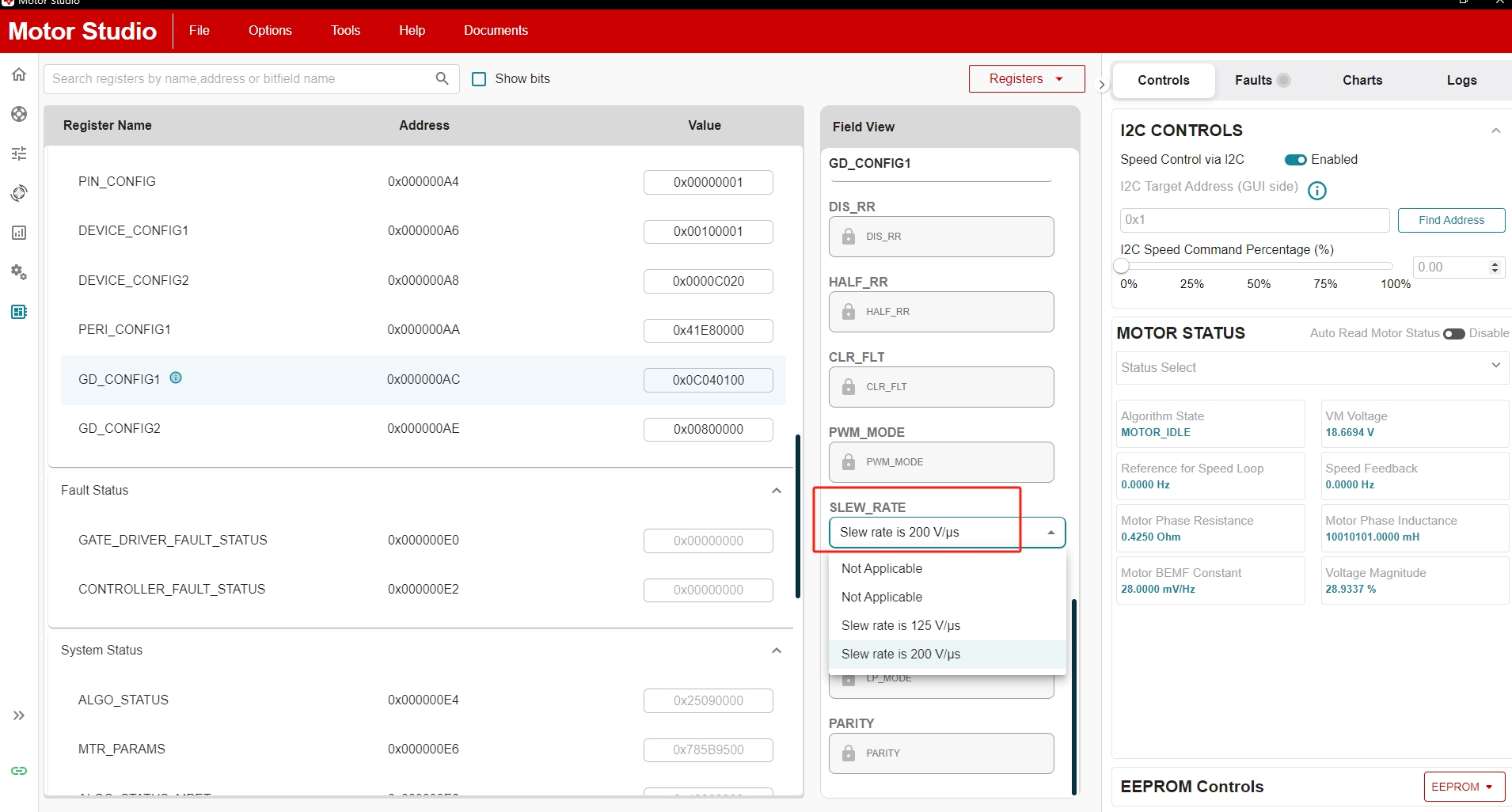
3. How do I adjust the dead time?
4. What is the size of the sampling resistor on the driver board?
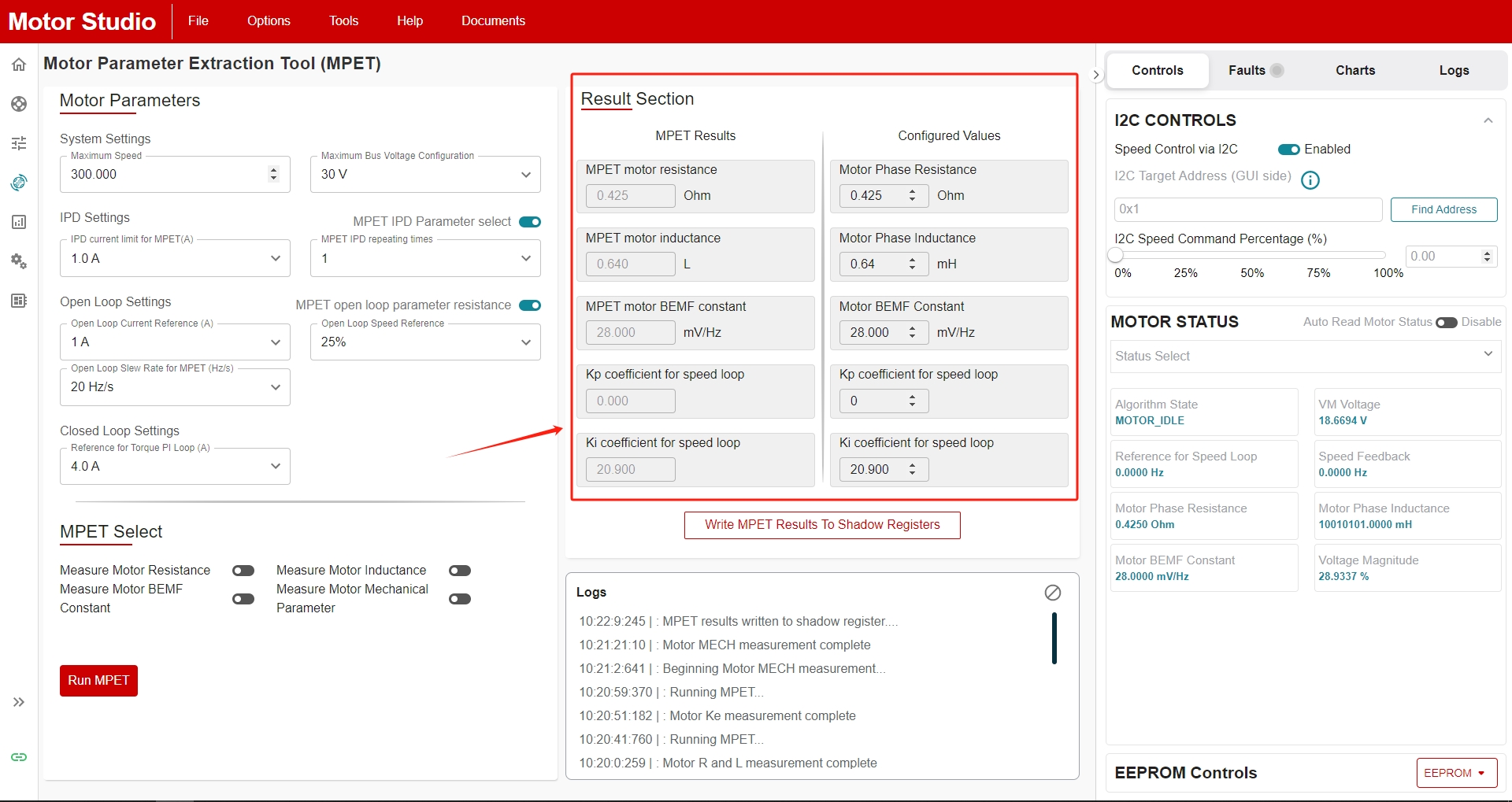
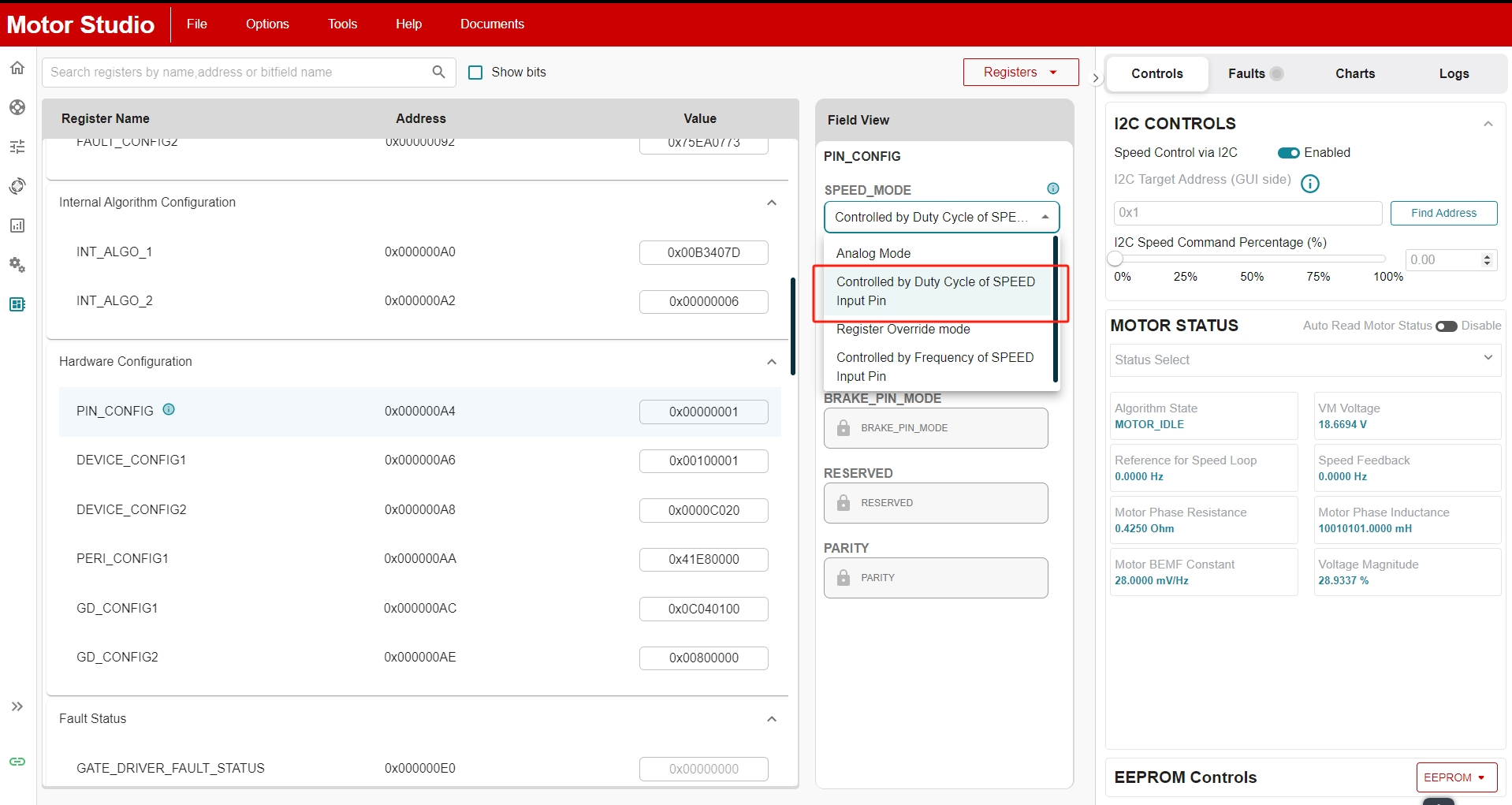
5. What parameters can we change on Motor Studio?
Please try to tell me with pictures what should be done.
I would appreciate if you could get back to me as soon as possible.