Tool/software:
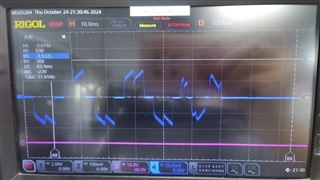
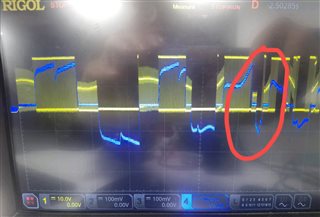
See picture,this is Open-loop to Closed-loop Conversion oscilloscope waveform,my motor startup failure at this moment.
I need some advice how to optimize this waveform,Make this electromagnetic Angle accurate.
This is my configuration parameter,Please check to see if there is any problem.
uint32_t prop_data[PROP_DATA_MAX]={
0x2C822180, //0x80
0x58C949C9, //0x82
0x724DA83C, //0x84
0x114670C8, //0x86
0x438A0028, //0x88
0x4CC40180, //0x8A
0x000008F9, //0x8C
0x1F41F419, //0x8E
0x0AF04C84, //0x90
0x78C24820, //0x92
0x79E80229, //0x94
0x36DB6DA6, //0x96
0x36DB6D80, //0x98
0x054BA106, //0x9A
0x12880000, //0x9C
0x00000000, //0x9E
0x00000000, //0xA0
0x00000000, //0xA2
0x00000004, //0xA4
0x000C0000, //0xA6
0x7FFF4800, //0xA8
0x00000000, //0xAA
0x1440180C, //0xAC
0x14000000}; //0xAE