Other Parts Discussed in Thread: MCF8316A, MCT8316A
Tool/software:
Hi Team,
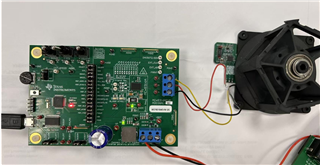
I used the MCF8316AEVM for drivering the motor by follow the step of the user's guide,i have some problems:My hardware setup is as follows:
The load file is as below:
{
"signature":"oneui-register-data",
"data":[
[
{
"idx":0,
"id":"ISD_CONFIG",
"value":"0x44638C20",
"addr":"0x00000080"
},
{
"idx":1,
"id":"REV_DRIVE_CONFIG",
"value":"0x283AF064",
"addr":"0x00000082"
},
{
"idx":2,
"id":"MOTOR_STARTUP1",
"value":"0x0B6807D0",
"addr":"0x00000084"
},
{
"idx":3,
"id":"MOTOR_STARTUP2",
"value":"0x23066000",
"addr":"0x00000086"
},
{
"idx":4,
"id":"CLOSED_LOOP1",
"value":"0x0C3181B0",
"addr":"0x00000088"
},
{
"idx":5,
"id":"CLOSED_LOOP2",
"value":"0x1AAD0000",
"addr":"0x0000008A"
},
{
"idx":6,
"id":"CLOSED_LOOP3",
"value":"0x00000000",
"addr":"0x0000008C"
},
{
"idx":7,
"id":"CLOSED_LOOP4",
"value":"0x0000012C",
"addr":"0x0000008E"
},
{
"idx":8,
"id":"SPEED_PROFILES1",
"value":"0x00000000",
"addr":"0x00000094"
},
{
"idx":9,
"id":"SPEED_PROFILES2",
"value":"0x00000000",
"addr":"0x00000096"
},
{
"idx":10,
"id":"SPEED_PROFILES3",
"value":"0x00000000",
"addr":"0x00000098"
},
{
"idx":11,
"id":"SPEED_PROFILES4",
"value":"0x00000000",
"addr":"0x0000009A"
},
{
"idx":12,
"id":"SPEED_PROFILES5",
"value":"0x00000000",
"addr":"0x0000009C"
},
{
"idx":13,
"id":"SPEED_PROFILES6",
"value":"0x00000000",
"addr":"0x0000009E"
}
],
[
{
"idx":0,
"id":"FAULT_CONFIG1",
"value":"0x5FE80206",
"addr":"0x00000090"
},
{
"idx":1,
"id":"FAULT_CONFIG2",
"value":"0x74000000",
"addr":"0x00000092"
}
],
[
{
"idx":0,
"id":"INT_ALGO_1",
"value":"0x00B3407D",
"addr":"0x000000A0"
},
{
"idx":1,
"id":"INT_ALGO_2",
"value":"0x000001A7",
"addr":"0x000000A2"
}
],
[
{
"idx":0,
"id":"PIN_CONFIG",
"value":"0x00000000",
"addr":"0x000000A4"
},
{
"idx":1,
"id":"DEVICE_CONFIG1",
"value":"0x00100000",
"addr":"0x000000A6"
},
{
"idx":2,
"id":"DEVICE_CONFIG2",
"value":"0x0000B000",
"addr":"0x000000A8"
},
{
"idx":3,
"id":"PERI_CONFIG1",
"value":"0x40000000",
"addr":"0x000000AA"
},
{
"idx":4,
"id":"GD_CONFIG1",
"value":"0x0C000100",
"addr":"0x000000AC"
},
{
"idx":5,
"id":"GD_CONFIG2",
"value":"0x00200000",
"addr":"0x000000AE"
}
],
[
{
"idx":0,
"id":"GATE_DRIVER_FAULT_STATUS",
"value":"0x00000000",
"addr":"0x000000E0"
},
{
"idx":1,
"id":"CONTROLLER_FAULT_STATUS",
"value":"0x00000000",
"addr":"0x000000E2"
}
],
[
{
"idx":0,
"id":"ALGO_STATUS",
"value":"0x00000000",
"addr":"0x000000E4"
},
{
"idx":1,
"id":"MTR_PARAMS",
"value":"0x00000000",
"addr":"0x000000E6"
},
{
"idx":2,
"id":"ALGO_STATUS_MPET",
"value":"0x00000000",
"addr":"0x000000E8"
}
],
[
{
"idx":0,
"id":"ALGO_CTRL1",
"value":"0x00000000",
"addr":"0x000000EA"
}
],
[
{
"idx":0,
"id":"ALGO_DEBUG1",
"value":"0x00000000",
"addr":"0x000000EC"
},
{
"idx":1,
"id":"ALGO_DEBUG2",
"value":"0x00000000",
"addr":"0x000000EE"
},
{
"idx":2,
"id":"CURRENT_PI",
"value":"0x00000000",
"addr":"0x000000F0"
},
{
"idx":3,
"id":"SPEED_PI",
"value":"0x00000000",
"addr":"0x000000F2"
},
{
"idx":4,
"id":"DAC_1",
"value":"0x00000000",
"addr":"0x000000F4"
},
{
"idx":5,
"id":"DAC_2",
"value":"0x00000000",
"addr":"0x000000F6"
}
],
[
{
"idx":0,
"id":"ALGORITHM_STATE",
"value":"0x00000000",
"addr":"0x00000210"
},
{
"idx":1,
"id":"FG_SPEED_FDBK",
"value":"0x00000000",
"addr":"0x00000216"
},
{
"idx":2,
"id":"BUS_CURRENT",
"value":"0x00000000",
"addr":"0x00000410"
},
{
"idx":3,
"id":"PHASE_CURRENT_A",
"value":"0x00000000",
"addr":"0x0000043E"
},
{
"idx":4,
"id":"PHASE_CURRENT_B",
"value":"0x00000000",
"addr":"0x00000440"
},
{
"idx":5,
"id":"PHASE_CURRENT_C",
"value":"0x00000000",
"addr":"0x00000442"
},
{
"idx":6,
"id":"CSA_GAIN_FEEDBACK",
"value":"0x00000000",
"addr":"0x00000466"
},
{
"idx":7,
"id":"VOLTAGE_GAIN_FEEDBACK",
"value":"0x00000000",
"addr":"0x00000476"
},
{
"idx":8,
"id":"VM_VOLTAGE",
"value":"0x00000000",
"addr":"0x0000047A"
},
{
"idx":9,
"id":"PHASE_VOLTAGE_VA",
"value":"0x00000000",
"addr":"0x0000047E"
},
{
"idx":10,
"id":"PHASE_VOLTAGE_VB",
"value":"0x00000000",
"addr":"0x00000480"
},
{
"idx":11,
"id":"PHASE_VOLTAGE_VC",
"value":"0x00000000",
"addr":"0x00000482"
},
{
"idx":12,
"id":"SIN_COMMUTATION_ANGLE",
"value":"0x00000000",
"addr":"0x000004BA"
},
{
"idx":13,
"id":"COS_COMMUTATION_ANGLE",
"value":"0x00000000",
"addr":"0x000004BC"
},
{
"idx":14,
"id":"IALPHA",
"value":"0x00000000",
"addr":"0x000004D4"
},
{
"idx":15,
"id":"IBETA",
"value":"0x00000000",
"addr":"0x000004D6"
},
{
"idx":16,
"id":"VALPHA",
"value":"0x00000000",
"addr":"0x000004D8"
},
{
"idx":17,
"id":"VBETA",
"value":"0x00000000",
"addr":"0x000004DA"
},
{
"idx":18,
"id":"ID",
"value":"0x00000000",
"addr":"0x000004E4"
},
{
"idx":19,
"id":"IQ",
"value":"0x00000000",
"addr":"0x000004E6"
},
{
"idx":20,
"id":"VD",
"value":"0x00000000",
"addr":"0x000004E8"
},
{
"idx":21,
"id":"VQ",
"value":"0x00000000",
"addr":"0x000004EA"
},
{
"idx":22,
"id":"IQ_REF_ROTOR_ALIGN",
"value":"0x00000000",
"addr":"0x00000524"
},
{
"idx":23,
"id":"SPEED_REF_OPEN_LOOP",
"value":"0x00000000",
"addr":"0x0000053A"
},
{
"idx":24,
"id":"IQ_REF_OPEN_LOOP",
"value":"0x00000000",
"addr":"0x00000548"
},
{
"idx":25,
"id":"SPEED_REF_CLOSED_LOOP",
"value":"0x00000000",
"addr":"0x000005CC"
},
{
"idx":26,
"id":"ID_REF_CLOSED_LOOP",
"value":"0x00000000",
"addr":"0x000005FC"
},
{
"idx":27,
"id":"IQ_REF_CLOSED_LOOP",
"value":"0x00000000",
"addr":"0x000005FE"
},
{
"idx":28,
"id":"ISD_STATE",
"value":"0x00000000",
"addr":"0x0000067A"
},
{
"idx":29,
"id":"ISD_SPEED",
"value":"0x00000000",
"addr":"0x00000684"
},
{
"idx":30,
"id":"IPD_STATE",
"value":"0x00000000",
"addr":"0x000006B8"
},
{
"idx":31,
"id":"IPD_ANGLE",
"value":"0x00000000",
"addr":"0x000006FC"
},
{
"idx":32,
"id":"ED",
"value":"0x00000000",
"addr":"0x00000742"
},
{
"idx":33,
"id":"EQ",
"value":"0x00000000",
"addr":"0x00000744"
},
{
"idx":34,
"id":"SPEED_FDBK",
"value":"0x00000000",
"addr":"0x00000752"
},
{
"idx":35,
"id":"THETA_EST",
"value":"0x00000000",
"addr":"0x00000756"
}
]
]
}
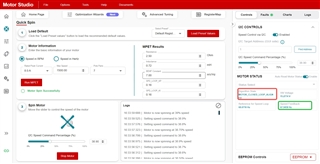
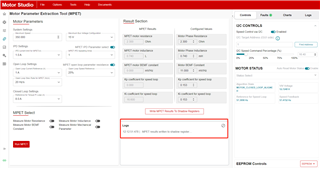
when i load the config and click the run MPET,i pull the slider to drive the motor successful,then i click the MPET reults to shadow registers the logs note the action is been going on,how do i make sure the MPET reults is writed to the registers sucessfully?
Another question,i want to drive the motor in closed loop,What should I do next?