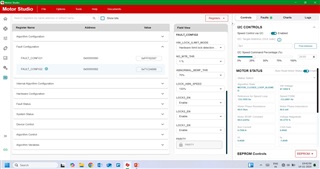
Tool/software:
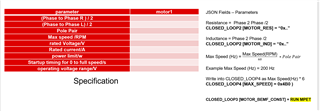
I had run the PMSM motor using the following register value attached.
Motor Control : FOC
No.of poles - 4
No.of phases - 3
No. of slots - 6
Wiring - Delta
Rotor Inertia - 75 gcm^2
Back EMF Waveform - Sine Wave
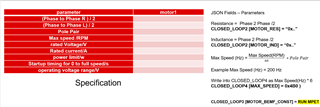
--> Back EMF Constant (Ke) line to line - 59 mVs/rad
--> Back EMF rms voltage (line to line) - 4.55 mV/rpm
--> Resistance (line to line) - 1.5 Ohm
--> Inductance (line to line) Lq - 4.5 mH
--> Inductance (line to line) Ld - 3.9 mH
These arrowed parameters are would be Tolerance of +/- 10%
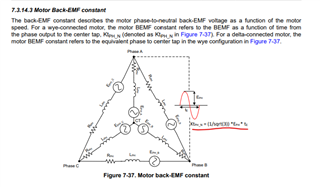
BEMF Constant (Ke) = Ui mean/(n/60*2Pi),
where,
Ui mean = Back EMF peak*3/Pi
n = approximate 1000 rpm
Basically this PMSM motor can run at the following parameters.
1. DC Link voltage range - 18 to 45 Vdc
2. Rated Voltage - 32 V
3. Rated RMS Current - 1.85 A
4. Rated Torque - 0.11 Nm
5. Rated Speed - 4000 rpm
6. Rated Input Power - 62 W
7. Rated Output Power - 46 W
8. Rated Efficiency - 74 %
9. Operation Mode - S1
10. Maximal Peak Torque - 0.51 Nm
11. Maximal Peak Current - 8.6 A
12. Over Load (I peak/ I rated) - 4.65
Note that:
1. the parameters rated voltage, rated rms current, rated torque and rated speed are achieved at S1 operation point under open loop @ 32V block operation
2. The rated RMS current tolerance would be +/- 10% (open loop @ 32V block operation)
3. The rated speed tolerance would be +/- 7% (open loop @ 32V block operation)
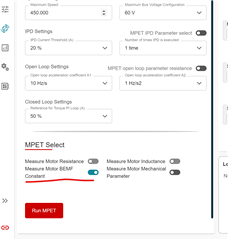
The Program I had currently using is as follow. In this the motor runs @ around 7000+ rpm at no load. But the voltage and current are not in stable condition. The voltage is rated voltage is 32V and at no load the current consuming is around 0.22. But these things are not in stable for any condition. Also it is only done at a Closed Loop Configuration. I don't know how to run the motor in open loop. Please provide me the link
{
"signature": "oneui-register-data",
"data": [
[
{
"idx": 0,
"id": "ISD_CONFIG",
"value": "0x74A4D4A1",
"addr": "0x00000080"
},
{
"idx": 1,
"id": "REV_DRIVE_CONFIG",
"value": "0x48300000",
"addr": "0x00000082"
},
{
"idx": 2,
"id": "MOTOR_STARTUP1",
"value": "0x0AE294C0",
"addr": "0x00000084"
},
{
"idx": 3,
"id": "MOTOR_STARTUP2",
"value": "0x0B81C007",
"addr": "0x00000086"
},
{
"idx": 4,
"id": "CLOSED_LOOP1",
"value": "0x26A001B8",
"addr": "0x00000088"
},
{
"idx": 5,
"id": "CLOSED_LOOP2",
"value": "0x0AADBDC0",
"addr": "0x0000008A"
},
{
"idx": 6,
"id": "CLOSED_LOOP3",
"value": "0x55800000",
"addr": "0x0000008C"
},
{
"idx": 7,
"id": "CLOSED_LOOP4",
"value": "0x1C904A8C",
"addr": "0x0000008E"
},
{
"idx": 8,
"id": "REF_PROFILES1",
"value": "0x00000000",
"addr": "0x00000094"
},
{
"idx": 9,
"id": "REF_PROFILES2",
"value": "0x00000000",
"addr": "0x00000096"
},
{
"idx": 10,
"id": "REF_PROFILES3",
"value": "0x80000004",
"addr": "0x00000098"
},
{
"idx": 11,
"id": "REF_PROFILES4",
"value": "0x00000000",
"addr": "0x0000009A"
},
{
"idx": 12,
"id": "REF_PROFILES5",
"value": "0x00000000",
"addr": "0x0000009C"
},
{
"idx": 13,
"id": "REF_PROFILES6",
"value": "0x00000000",
"addr": "0x0000009E"
}
],
[
{
"idx": 0,
"id": "FAULT_CONFIG1",
"value": "0xAC302587",
"addr": "0x00000090"
},
{
"idx": 1,
"id": "FAULT_CONFIG2",
"value": "0x71C04888",
"addr": "0x00000092"
}
],
[
{
"idx": 0,
"id": "INT_ALGO_1",
"value": "0x09466A3D",
"addr": "0x000000A0"
},
{
"idx": 1,
"id": "INT_ALGO_2",
"value": "0x421402E1",
"addr": "0x000000A2"
}
],
[
{
"idx": 0,
"id": "PIN_CONFIG",
"value": "0xD8032248",
"addr": "0x000000A4"
},
{
"idx": 1,
"id": "DEVICE_CONFIG1",
"value": "0x80100002",
"addr": "0x000000A6"
},
{
"idx": 2,
"id": "DEVICE_CONFIG2",
"value": "0x03E8F00C",
"addr": "0x000000A8"
},
{
"idx": 3,
"id": "PERI_CONFIG1",
"value": "0x69005CE0",
"addr": "0x000000AA"
},
{
"idx": 4,
"id": "GD_CONFIG1",
"value": "0x0000807B",
"addr": "0x000000AC"
},
{
"idx": 5,
"id": "GD_CONFIG2",
"value": "0x80000200",
"addr": "0x000000AE"
}
]
]
}