


Other Parts Discussed in Thread: MCF8329A
Tool/software:
Hi
I am experiencing a start-up issue with the MCF8316C. I am using the Maxon 449464 motor.
The application uses PWM (5kHz) to control speed, and the test I am running consist of 3 seconds run (stepped 0% to 16% duty cycle) followed by 2 seconds off (stepped from 15% to 0% duty cycle) repeated indefinitely.
Randomly from time to time, the driver doesn't start the motor up, although the algorithm has ramped up to closed loop control:

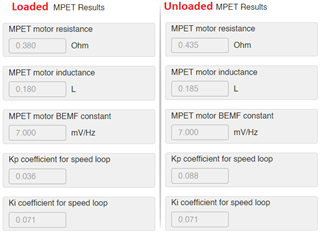
MPET results for loaded and unloaded motor shown below, currently using unloaded values to run testing. Should the loaded values be used instead?
Configuration file also attached.
