Other Parts Discussed in Thread: DRV8316
Tool/software:
Dear TI Expert,
I am currently using the DRV8316R motor driver in combination with the LaunchPadF280025C to run a BLDC motor my main intention is to run a BLDC motor in low speed around 0.15 RPM.
The same motor operates successfully at slow speed with the Arduino Mega, LaunchPadF280025C, and ST driver (L6234). However, when I attempt to run it using the DRV8316R, I encounter the following issues:
- The motor initially starts spinning but then freezes and jerks ("chucks").
- All the driver registers reset to their default values.
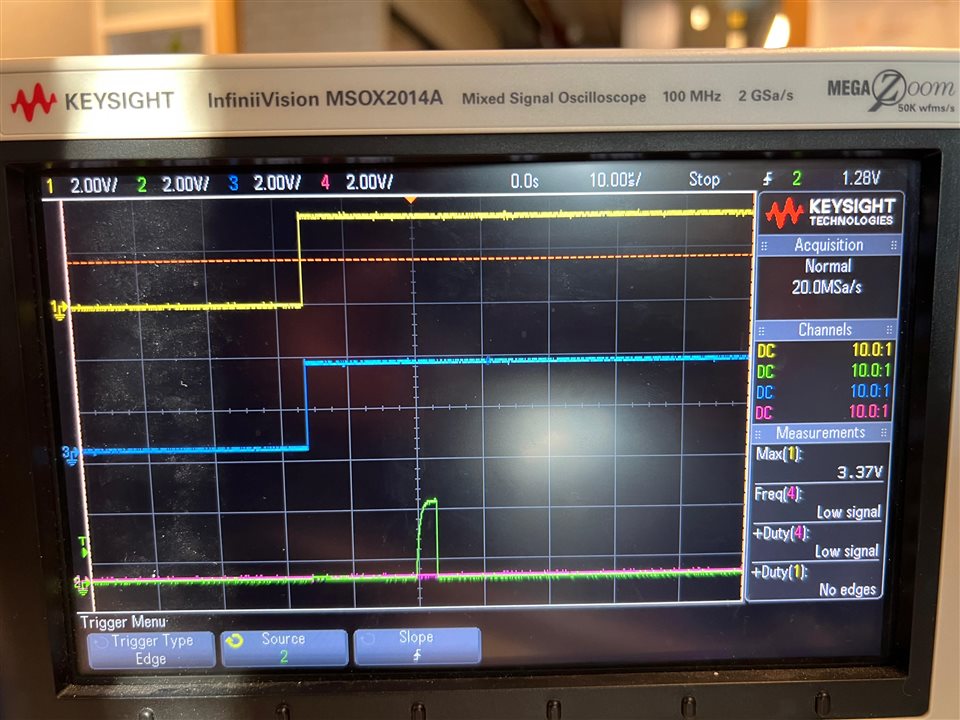
- The LaunchPadF280025C continues to output PWM signals on all phases, but the DRV8316R driver produces no output.
Additionally, I’ve observed the following behaviors:
- When I disable the current limit, the motor occasionally runs at an extremely high speed and triggers faults. If I adjust the delay to slow it down, the motor freezes again without any fault, and the registers reset to their default values.
- In some cases, the motor triggers an overcurrent fault without spinning. Disabling the overcurrent fault causes the motor to freeze once more, with all the registers resetting to their default values.
I would greatly appreciate any guidance or suggestions on troubleshooting this behavior.
important to mention:
I unlock the register's
DRV8316R_writeRegister(mySPIA_BASE, 0x03,drv8316regs.CTRL1| 0x03);
I'm using 3 PWM mode:
i set the INLx to HIgh as shown in the table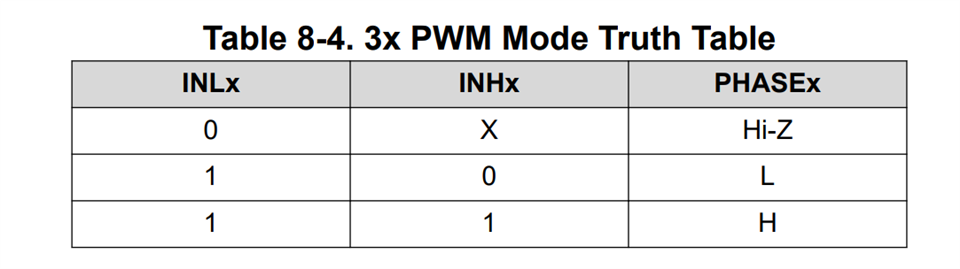
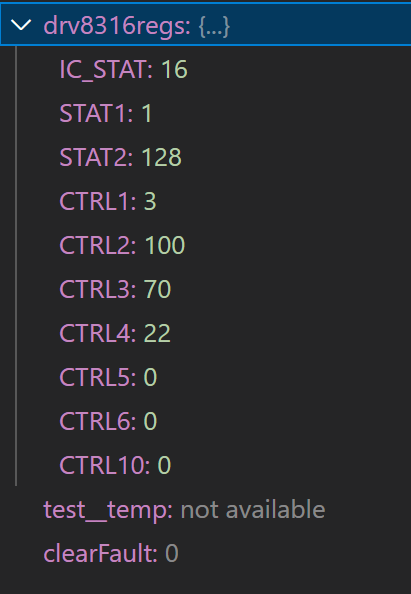
All the register go back to default value: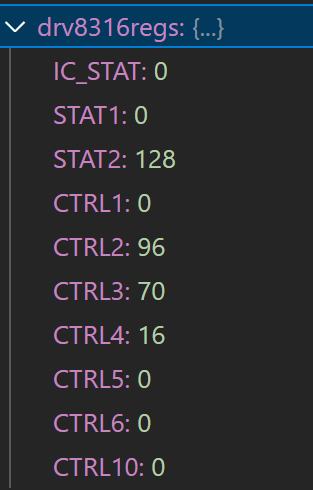
Fault: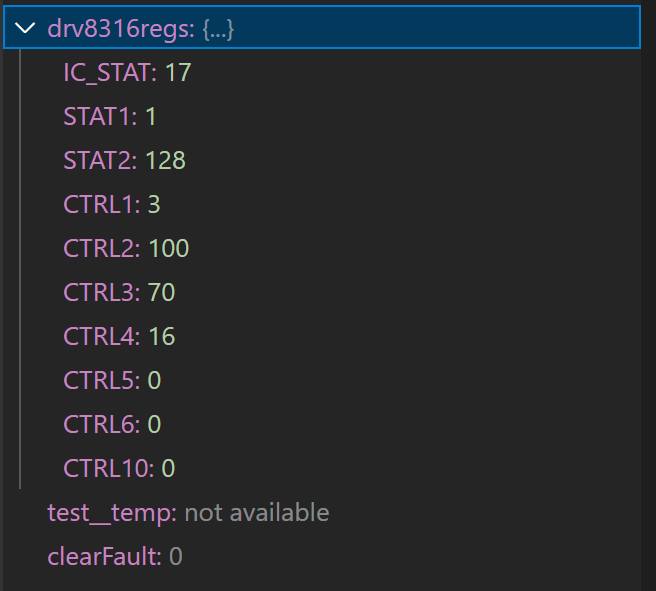
run very fast with fault's:
Video:
I set the DRVOFF pin to low
My older posts:
A, B
Thank you in advance for your assistance!