Other Parts Discussed in Thread: MCF8329A, MOTORSTUDIO
Tool/software:
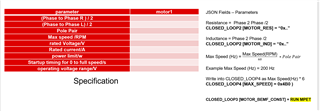
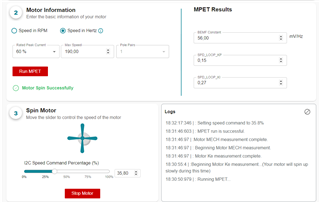
Hello, I try to use a MCF8329A chip with a small BLDC motor. I have set all the motor parameters and could perform the MPET successfully.
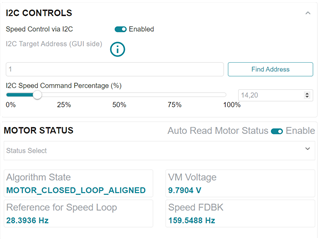
I want to spin the motor from the Motor Studio now, but regardless of the I2C Speed Command Percentage it doesn't move:
What am I doing wrong? Speed Control via I2C is already enabled.