Tool/software:
Hi,
I have a few questions about Silent Step Decay mode and Auto-torque mode.
Silent Step Decay mode:
Im trying to figure out the correct parameters for this mode. I have a motor, that should run with speeds from 4 to 10240 steps per second (1/8 steps) in auto microstepping mode (1/256).
Until which speed should I use this mode?
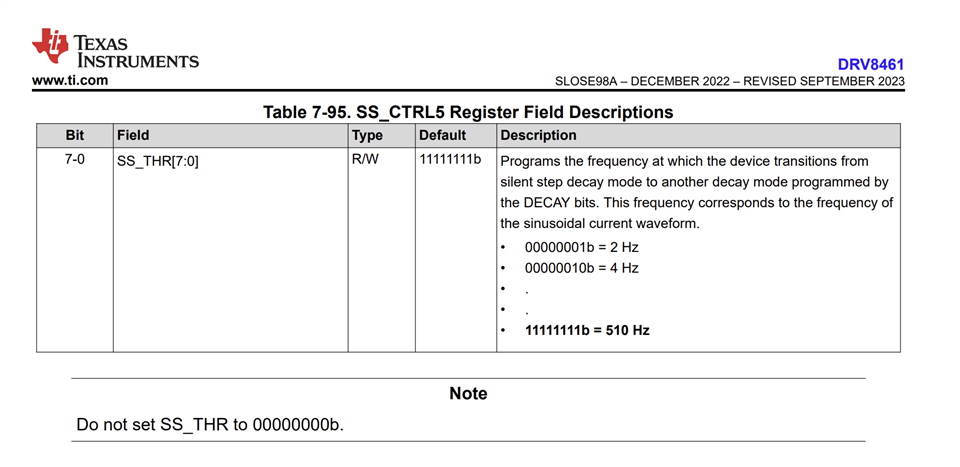
With this formula: fSTEP = (SS_THR * 1000 * usm) / 256 fSTEP is 10240 at highest speed and usm is 256, so SS_THR should be 10Hz?
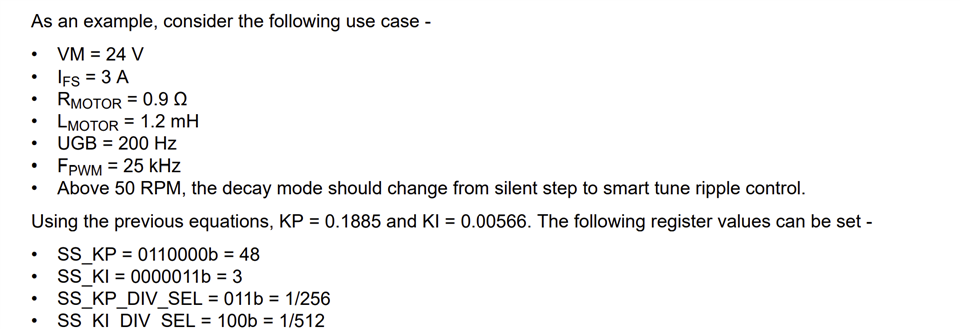
And with VM=24V, L=2.8mH, R=1.8Ohm and UGB = 200Hz
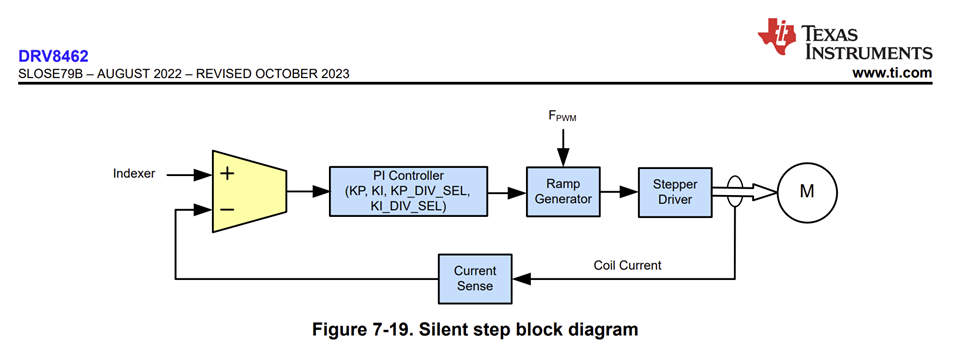
KP = 6 * π * UGB * LMOTOR / VM = 0.44
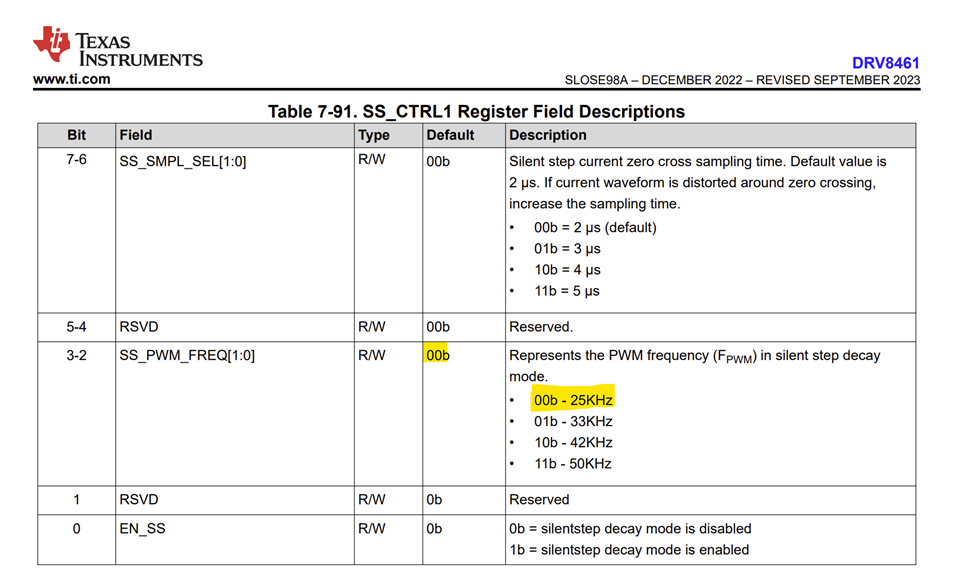
KI = KP * RMOTOR / (FPWM * LMOTOR) = 11.31
With these values, which values do I have to set for SS_KP and SS_KI?
Auto-torque mode:
I understood, that I should run the learning mode without load and that I have to run it again if the speed changes by +-10%. We have different fixed speeds, so I could run it for these speeds and change the configuration via SPI if another speed mode was selected to the corresponding measured values.
But to which values do I have to set ATQ_LRN_MIN_CURRENT and ATQ_LRN_STEP?
In the manual this is mentioned: It is recommended to select the initial current level between 30% to 50% of the maximum operating current.
But which current? The full scale current? In mA or A? And to which value do I have to set it, if the max. current is e.g. 1.7A?
Best regards
Thilo