Other Parts Discussed in Thread: MCT8329EVM
Tool/software:
Hello Sir,
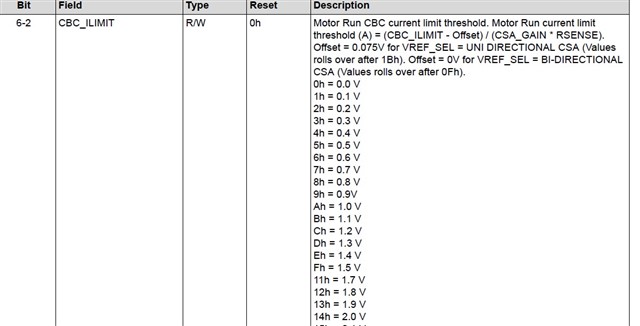
Currently I am working on MCT8329A and able to control the motor speed in closed loop. But by using the current sense resistor we couldn't limit the current accordingly, based on ILIMIT which I have to mention in the GUI.
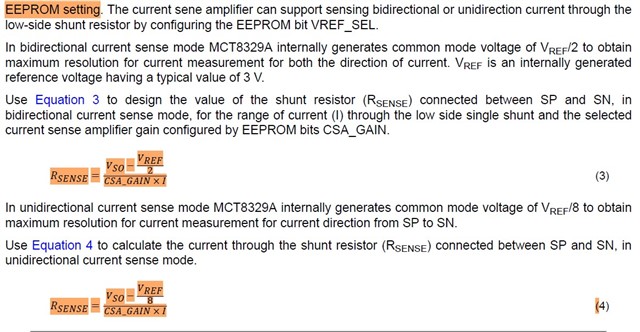
Whatever the formula mentioned in the datasheet, ILIMIT is calculated and accordingly set the same value in the GUI considering the 10mOHM instead of 1mOHM. While loading the motor, it is giving the fault above the ILIMIT instead exactly at that ILIMIT.
Initially, it is clearly mentioned the different offsets for unidirectional and bidirectional. But in case of registers setting for bidirectional offset is 0 and 0.075 for unidirectional. I think there is an issue with offset. It has to give the fault exactly at the ILIMIT set in GUI.