Other Parts Discussed in Thread: DRV8231,
Tool/software:
Hi Team,
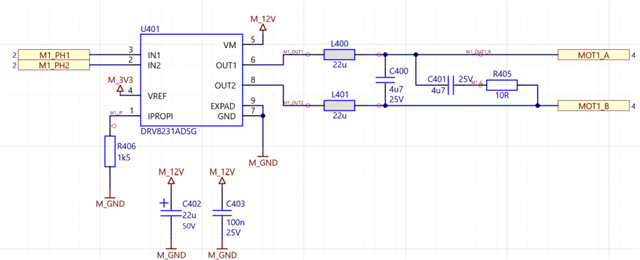
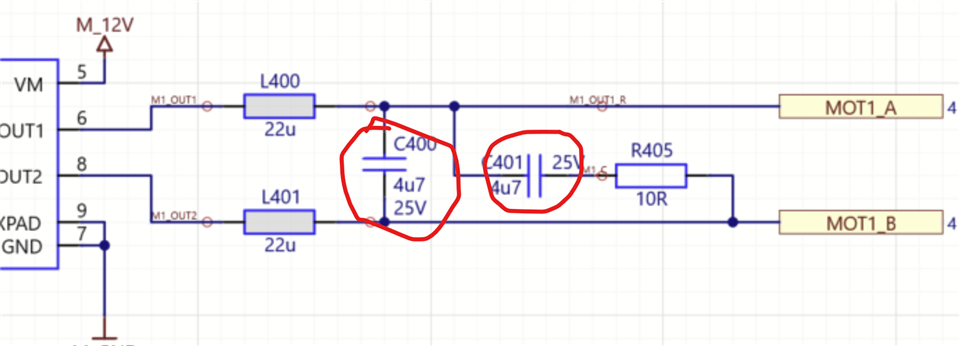
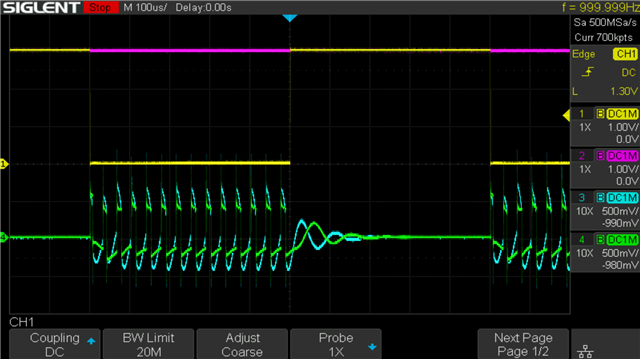
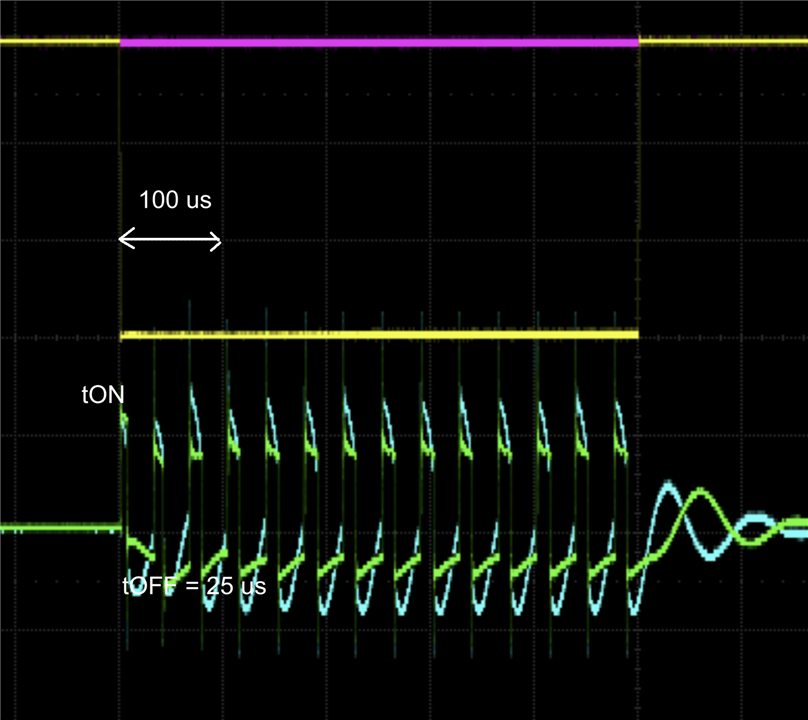
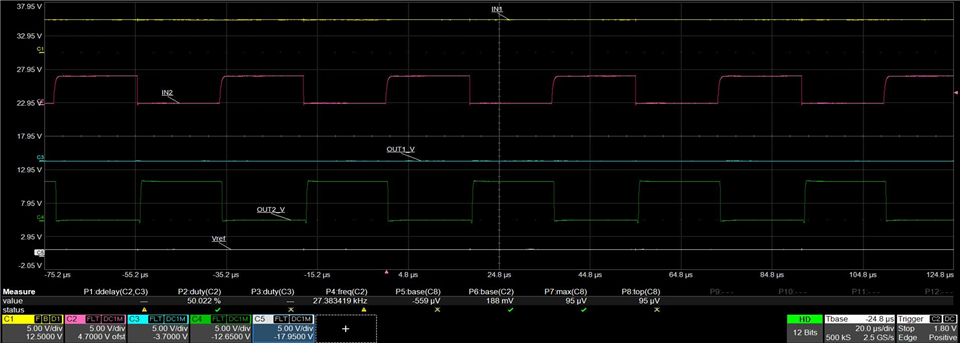
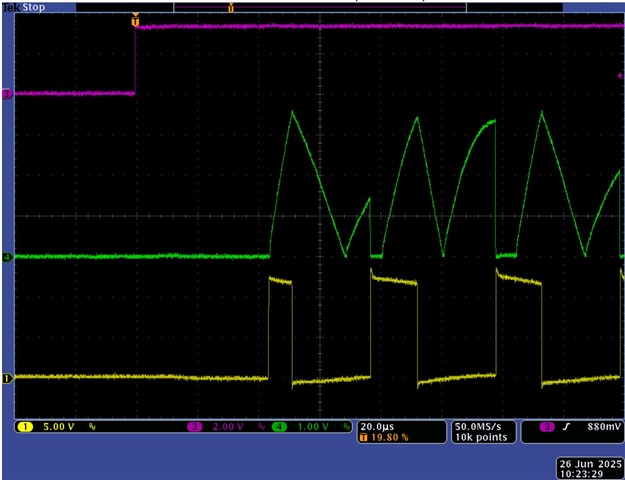
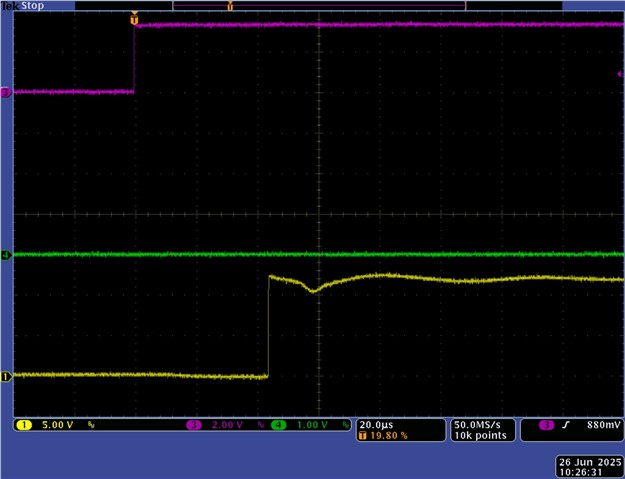
could you please check this circuit. Even if the motor is not connected the driver goes into overcurrent state. We set the input pins to 0 and 1 static and measured only a low voltage at the high side output of the driver with a waveform that shows a perodically switching off and on. We seemed this comes from the overcurrent state. The chip gets warm during test. Could you give us a hint? May be the ic is not the correct one DRV8231A but the DRV8231?