


Other Parts Discussed in Thread: DRV8353
Tool/software:
Hi All
I have a question about DRV8353F.
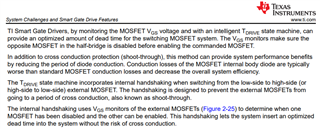
(1) As stated in the document Understanding Smart Gate Drive, will the dead time change because the dead time is optimized?
https://www.ti.com/jp/lit/an/slva714d/slva714d.pdf
Or is it fixed at the standard value described in the specs below?

(2) It is stated that the operation when SPI is overcurrent operates in cycle-by-cycle (CBC) mode by default, but does this mean the same as Automatic Retry in OCP_MODE?
(3) We are considering both the DRV8353F (40 pin) and the DRV8353 (40 pin), and plan to use a common layout.
The DRV8353 data sheet does not include a reference layout for the 40 pin. Is it okay to use the same layout as the DRV8353F data sheet?
Best Regards,
Ishiwata





