Tool/software:
你好 ,我正在考虑使用DRV8702-Q1 做一个电机控制器的驱动,请问如何控制电机的方向和速度,
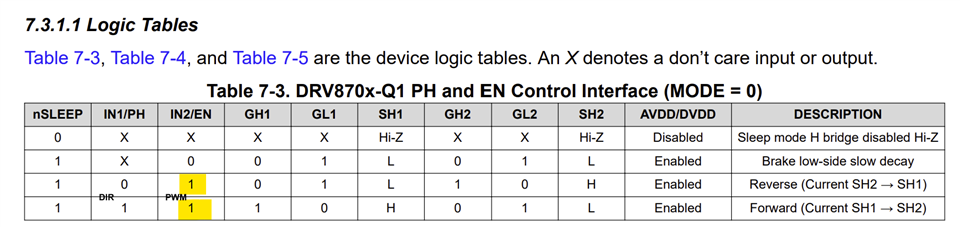
在规格书第Page 24 中介绍PWM控制接口,IN1=1 是否意味着可以输入PWM占空比为100% ?而IN1=0 , 则意味 PWM为0% ? 比如 IN2 端口输入PWM duty 为0%(相当于低电平 0 ),此时 IN1 端口输入PWM (duty 为0%--100% 变化 ),是否意味着电机速度从0 到最高速度 ?
谢谢,
亚历克斯
Original question:

[FAQ] What interface (PH-EN or PWM) to use for controlling brushed DC motors
Tool/software:
你好 ,我正在考虑使用DRV8702-Q1 做一个电机控制器的驱动,请问如何控制电机的方向和速度,
在规格书第Page 24 中介绍PWM控制接口,IN1=1 是否意味着可以输入PWM占空比为100% ?而IN1=0 , 则意味 PWM为0% ? 比如 IN2 端口输入PWM duty 为0%(相当于低电平 0 ),此时 IN1 端口输入PWM (duty 为0%--100% 变化 ),是否意味着电机速度从0 到最高速度 ?
谢谢,
亚历克斯