


Other Parts Discussed in Thread: MCF8329EVM,
Tool/software:
Hi Expert
I am trying to spin a motor with MCF8329EVM, but it get failed, please help me
The motor I use is M-2310P-LN-04K(most TI's demo used)

More detail should be below one
Hardware setup:
Power source: 15V max 5A
EVM settings followed the guide from the GUI motor studio.
I get a parameter setting from previous colleague as below
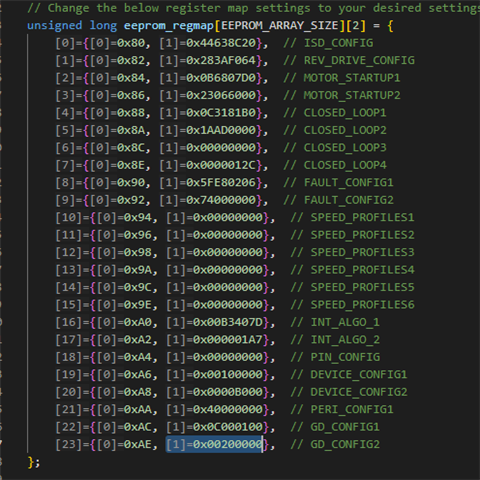
And I make change of a json file that download from the E2E FAQ 8. BLDC_Pump_3A_200Hz_MCF8329A_v1.json (can work upto 5A)
Replace the register from 0x80 ~0xAE with the value from previous colleague above picture.
So I get the a json file as this
{
"signature":"oneui-register-data",
"data":[
[
{
"idx":0,
"id":"ISD_CONFIG",
"value":"0x44638C20",
"addr":"0x00000080"
},
{
"idx":1,
"id":"REV_DRIVE_CONFIG",
"value":"0x283AF064",
"addr":"0x00000082"
},
{
"idx":2,
"id":"MOTOR_STARTUP1",
"value":"0x0B6807D0",
"addr":"0x00000084"
},
{
"idx":3,
"id":"MOTOR_STARTUP2",
"value":"0x23066000",
"addr":"0x00000086"
},
{
"idx":4,
"id":"CLOSED_LOOP1",
"value":"0x0C3181B0",
"addr":"0x00000088"
},
{
"idx":5,
"id":"CLOSED_LOOP2",
"value":"0x1AAD0000",
"addr":"0x0000008A"
},
{
"idx":6,
"id":"CLOSED_LOOP3",
"value":"0x00000000",
"addr":"0x0000008C"
},
{
"idx":7,
"id":"CLOSED_LOOP4",
"value":"0x0000012C",
"addr":"0x0000008E"
},
{
"idx":8,
"id":"REF_PROFILES1",
"value":"0x00000000",
"addr":"0x00000094"
},
{
"idx":9,
"id":"REF_PROFILES2",
"value":"0x00000000",
"addr":"0x00000096"
},
{
"idx":10,
"id":"REF_PROFILES3",
"value":"0x00000000",
"addr":"0x00000098"
},
{
"idx":11,
"id":"REF_PROFILES4",
"value":"0x00000000",
"addr":"0x0000009A"
},
{
"idx":12,
"id":"REF_PROFILES5",
"value":"0x00000000",
"addr":"0x0000009C"
},
{
"idx":13,
"id":"REF_PROFILES6",
"value":"0x00000000",
"addr":"0x0000009E"
}
],
[
{
"idx":0,
"id":"FAULT_CONFIG1",
"value":"0x5FE80206",
"addr":"0x00000090"
},
{
"idx":1,
"id":"FAULT_CONFIG2",
"value":"0x74000000",
"addr":"0x00000092"
}
],
[
{
"idx":0,
"id":"INT_ALGO_1",
"value":"0x00B3407D",
"addr":"0x000000A0"
},
{
"idx":1,
"id":"INT_ALGO_2",
"value":"0x000001A7",
"addr":"0x000000A2"
}
],
[
{
"idx":0,
"id":"PIN_CONFIG",
"value":"0x00000000",
"addr":"0x000000A4"
},
{
"idx":1,
"id":"DEVICE_CONFIG1",
"value":"0x00100000",
"addr":"0x000000A6"
},
{
"idx":2,
"id":"DEVICE_CONFIG2",
"value":"0x0000B000",
"addr":"0x000000A8"
},
{
"idx":3,
"id":"PERI_CONFIG1",
"value":"0x40000000",
"addr":"0x000000AA"
},
{
"idx":4,
"id":"GD_CONFIG1",
"value":"0x0C000100",
"addr":"0x000000AC"
},
{
"idx":5,
"id":"GD_CONFIG2",
"value":"0x00200000",
"addr":"0x000000AE"
}
],
[
{
"idx":0,
"id":"GATE_DRIVER_FAULT_STATUS",
"value":"0x00000000",
"addr":"0x000000E0"
},
{
"idx":1,
"id":"CONTROLLER_FAULT_STATUS",
"value":"0x00000000",
"addr":"0x000000E2"
}
],
[
{
"idx":0,
"id":"ALGO_STATUS",
"value":"0x10C60004",
"addr":"0x000000E4"
},
{
"idx":1,
"id":"MTR_PARAMS",
"value":"0x00000000",
"addr":"0x000000E6"
},
{
"idx":2,
"id":"ALGO_STATUS_MPET",
"value":"0x01000000",
"addr":"0x000000E8"
}
],
[
{
"idx":0,
"id":"ALGO_CTRL1",
"value":"0x8A500000",
"addr":"0x000000EA"
}
],
[
{
"idx":0,
"id":"ALGO_DEBUG1",
"value":"0x80000000",
"addr":"0x000000EC"
},
{
"idx":1,
"id":"ALGO_DEBUG2",
"value":"0x00000000",
"addr":"0x000000EE"
},
{
"idx":2,
"id":"CURRENT_PI",
"value":"0x02FC012F",
"addr":"0x000000F0"
},
{
"idx":3,
"id":"SPEED_PI",
"value":"0x00000000",
"addr":"0x000000F2"
},
{
"idx":4,
"id":"DAC_1",
"value":"0x0003F40E",
"addr":"0x000000F4"
}
],
[
{
"idx":0,
"id":"ALGORITHM_STATE",
"value":"0x00000000",
"addr":"0x00000196"
},
{
"idx":1,
"id":"FG_SPEED_FDBK",
"value":"0x7FFFFFFF",
"addr":"0x0000019C"
},
{
"idx":2,
"id":"BUS_CURRENT",
"value":"0x00000000",
"addr":"0x0000040E"
},
{
"idx":3,
"id":"PHASE_CURRENT_A",
"value":"0x00090000",
"addr":"0x0000043C"
},
{
"idx":4,
"id":"PHASE_CURRENT_B",
"value":"0x00020000",
"addr":"0x0000043E"
},
{
"idx":5,
"id":"PHASE_CURRENT_C",
"value":"0x00110000",
"addr":"0x00000440"
},
{
"idx":6,
"id":"CSA_GAIN_FEEDBACK",
"value":"0x00000000",
"addr":"0x00000450"
},
{
"idx":7,
"id":"VOLTAGE_GAIN_FEEDBACK",
"value":"0x00000000",
"addr":"0x00000458"
},
{
"idx":8,
"id":"VM_VOLTAGE",
"value":"0x01A20000",
"addr":"0x0000045C"
},
{
"idx":9,
"id":"PHASE_VOLTAGE_VA",
"value":"0x0008A906",
"addr":"0x00000460"
},
{
"idx":10,
"id":"PHASE_VOLTAGE_VB",
"value":"0x0008A906",
"addr":"0x00000462"
},
{
"idx":11,
"id":"PHASE_VOLTAGE_VC",
"value":"0x000B4221",
"addr":"0x00000464"
},
{
"idx":12,
"id":"SIN_COMMUTATION_ANGLE",
"value":"0xFDF10562",
"addr":"0x000004AA"
},
{
"idx":13,
"id":"COS_COMMUTATION_ANGLE",
"value":"0x07B822D0",
"addr":"0x000004AC"
},
{
"idx":14,
"id":"IALPHA",
"value":"0xFFFF0000",
"addr":"0x000004CC"
},
{
"idx":15,
"id":"IBETA",
"value":"0xFFECF28B",
"addr":"0x000004CE"
},
{
"idx":16,
"id":"VALPHA",
"value":"0x000A49C6",
"addr":"0x000004D0"
},
{
"idx":17,
"id":"VBETA",
"value":"0x003598E8",
"addr":"0x000004D2"
},
{
"idx":18,
"id":"ID",
"value":"0x0003F171",
"addr":"0x000004DC"
},
{
"idx":19,
"id":"IQ",
"value":"0xFFED5C1F",
"addr":"0x000004DE"
},
{
"idx":20,
"id":"VD",
"value":"0xFFFC200F",
"addr":"0x000004E0"
},
{
"idx":21,
"id":"VQ",
"value":"0x0036835D",
"addr":"0x000004E2"
},
{
"idx":22,
"id":"IQ_REF_ROTOR_ALIGN",
"value":"0x00000000",
"addr":"0x0000051A"
},
{
"idx":23,
"id":"SPEED_REF_OPEN_LOOP",
"value":"0x00028F59",
"addr":"0x00000532"
},
{
"idx":24,
"id":"IQ_REF_OPEN_LOOP",
"value":"0x0024D3F5",
"addr":"0x00000542"
},
{
"idx":25,
"id":"SPEED_REF_CLOSED_LOOP",
"value":"0x00000000",
"addr":"0x000005D0"
},
{
"idx":26,
"id":"ID_REF_CLOSED_LOOP",
"value":"0x00000000",
"addr":"0x0000060A"
},
{
"idx":27,
"id":"IQ_REF_CLOSED_LOOP",
"value":"0x00000000",
"addr":"0x0000060C"
},
{
"idx":28,
"id":"ISD_STATE",
"value":"0x00000005",
"addr":"0x000006B0"
},
{
"idx":29,
"id":"ISD_SPEED",
"value":"0x000004ED",
"addr":"0x000006BA"
},
{
"idx":30,
"id":"IPD_STATE",
"value":"0x0004000B",
"addr":"0x000006E4"
},
{
"idx":31,
"id":"IPD_ANGLE",
"value":"0x07AAC5FD",
"addr":"0x0000071A"
},
{
"idx":32,
"id":"ED",
"value":"0x00000148",
"addr":"0x0000075C"
},
{
"idx":33,
"id":"EQ",
"value":"0x00000109",
"addr":"0x0000075E"
},
{
"idx":34,
"id":"SPEED_FDBK",
"value":"0x00000000",
"addr":"0x0000076E"
},
{
"idx":35,
"id":"THETA_EST",
"value":"0xFFFE2C10",
"addr":"0x00000774"
}
]
]
}
Load it at the step 1

Then I go to step 2
make change of the pole pairs to 8 and Run MPET
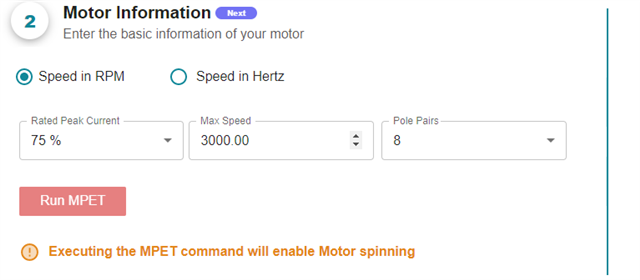
But the motor can't spin with the error below
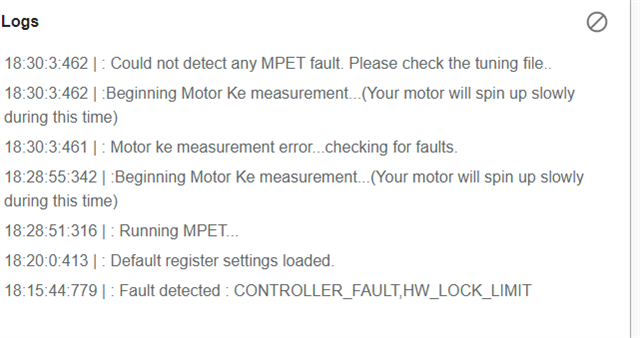
What I missing there? Please guide me, thanks
