Tool/software:
Hello E2E Experts,
Good day.
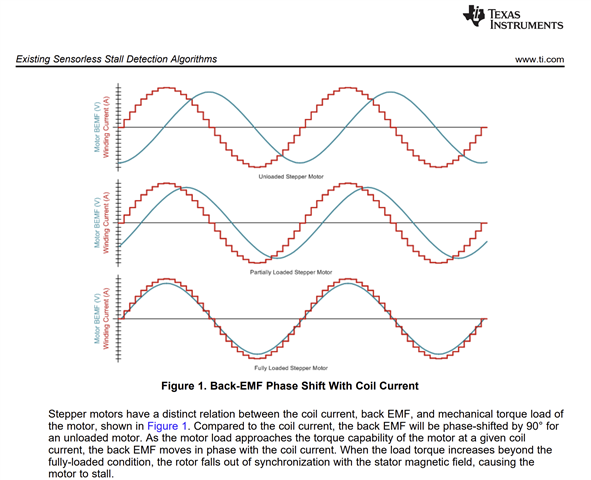
I’ve been reading the documentation Sensorless Stall Detection With the DRV8889-Q1, which explains the stall detection methods. In Section 3.2 (Constant OFF-time Method), it states that when the back-EMF increases, the T<sub>ON</sub> decreases, which results in more PWM cycles.
However, in Section 3.3 (PWM Cycle-Counting Method), it states that back-EMF decreases at stall condition, allowing a faster current rise time. This seems to contradict the explanation in Section 3.2.
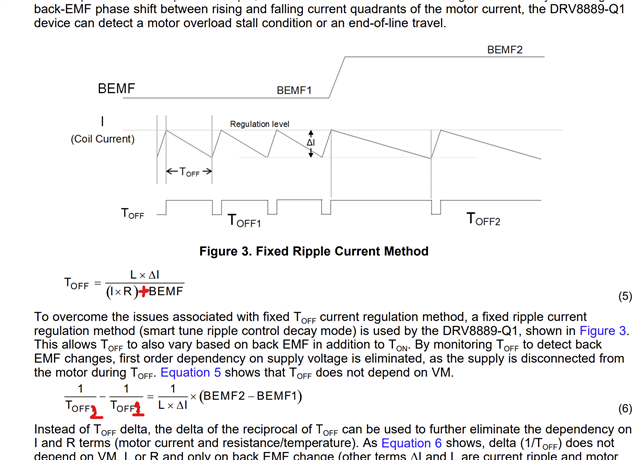
Additionally, in both Sections 3.2 and 4.1, the equations for Ton and Toff include the term (IR – BEMF). I’m unable to derive this term from the standard stepper motor equations,
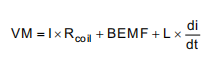
as the result i get is always (-IR-BEMF), and I’m wondering how it is obtained.
Regards,
TICSC