Other Parts Discussed in Thread: MCF8316A
Tool/software:
I am testing the mcf8329a evm board.
The aiming application is 16k rpm with a 8poles motor. Current up to 6A.
Input the motor mechanical poles, resistor, inductance (measured by LCR).
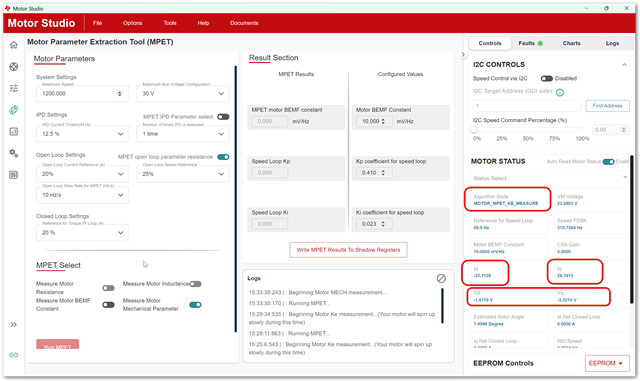
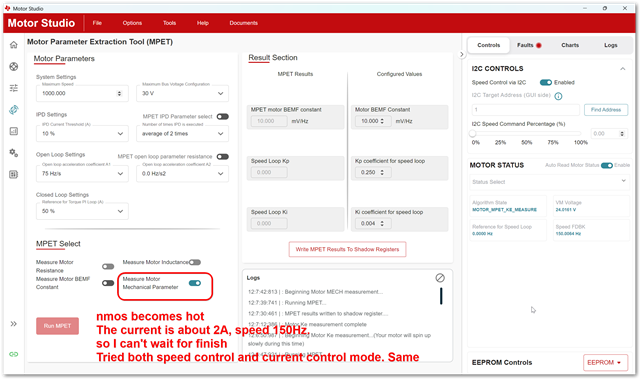
And try to tune the mechanical parameters by running the testing with the snapshot
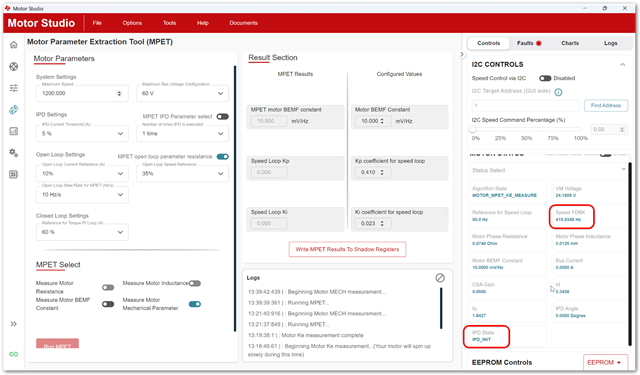
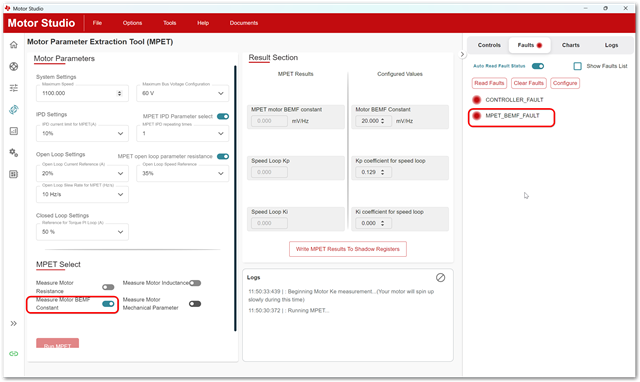
The motor spins at the frequency of 400Hz, but it looks it is still in the IPD init stage. How does this happen?
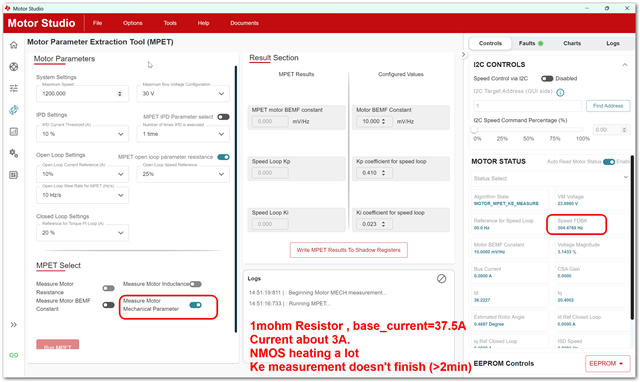
And the mosfet running very hot. The voltage is 24v, current is about 2A.
I have to stop the motor before it burns.
How to tune the parameters?Shall I upload the csv registers values?
Thanks