Part Number: MCF8329A-Q1
Other Parts Discussed in Thread: MCF8329A
Tool/software:
Dear TI-experts,
we are currently working on your chip MCF8329A-Q1 with the EVM and I am trying to understand the control algorithm.
The first question is how does the auto calculation of the parameters work? What are the assumptions or goals of the closed loop, e.g. rise time/time constant? I would like to have the equations and explanations.
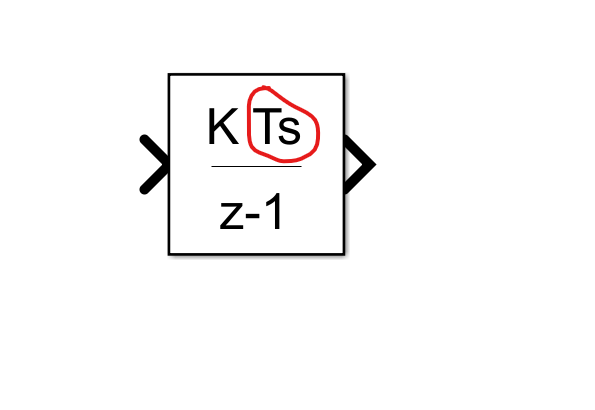
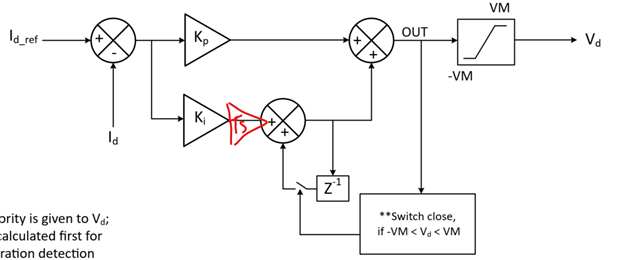
The second question is whether the discrete integrator is considering the discrete sampling time Ts? It is not visualized in the datasheet but I am quite sure it is. What is the discrete sampling time? I guess it depends on PWM_FREQ_OUT.

I am sorry if this information is already available somewhere.
Best regards,
Manuel
PS: I hope the datasheet gets updated as there are a lot of inconsistencies e.g. CURRENT_LOOP_KP is confused with CURR_LOOP_KP etc...