Other Parts Discussed in Thread: , CSD18502Q5B, , CSD18531Q5A
Tool/software:
Hello Team,
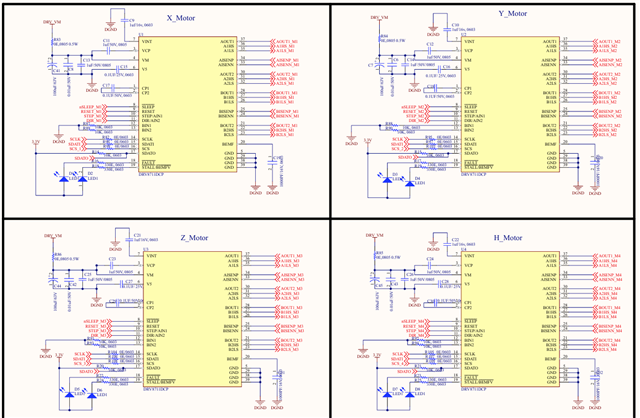
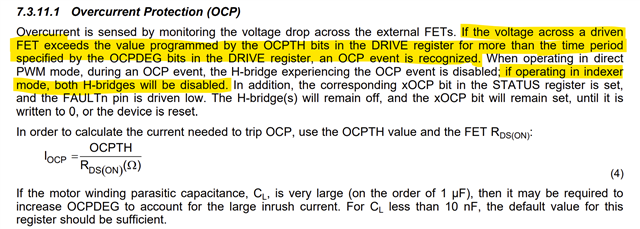
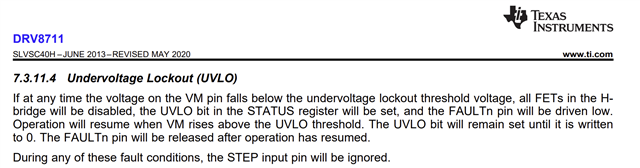
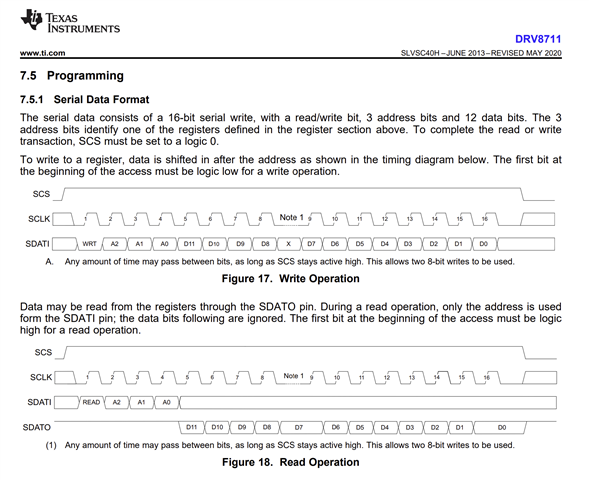
We have designed a 4-channel motor driver board using DRV8711 + external MOSFETs (Vishay SQJ952EP-T1_GE3) to drive 24 V stepper motors (each motor up to ~10 A).
In our testing, we are observing different behavior on each driver:
-
Driver #1 → Not generating PWM at the outputs. No motor movement.
-
Driver #2 → Working fine, motor runs normally.
-
Driver #3 → Not working. When monitoring the motor winding voltages:
-
Winding1 = 0 V
-
Winding2 = 24 V (stuck high)
-
-
Driver #4 → PWM is generated, but when we connect a motor, the driver goes into FAULT condition immediately.
So effectively, only Driver #2 is functional, while #1, #3, and #4 fail in different ways.
Our setup:
-
24 V supply input
-
DRV8711 (4x, each channel has its own driver IC + MOSFETs)
-
Shared SPI bus for configuration (chip select separated)
-
External MOSFETs: SQJ952EP-T1_GE3
-
Current sense resistors = 50mΩ
-
Gate resistors = 10Ω
-
What could cause no PWM output on Driver #1 and #3, even though SPI configuration is correct?
-
Why does Driver #3 output 0 V on one winding and 24 V stuck on the other? Could this indicate a MOSFET short or DRV8711 internal issue?
-
On Driver #4, what could trigger a FAULT as soon as motor is connected (overcurrent, gate drive issue, MOSFET suitability)?
-
Are there any recommended debug steps to isolate whether the issue is in DRV8711 IC configuration, gate drive, or MOSFET hardware?
Any guidance or debug procedure will be very helpful.